Chapitre 3 Performances du retour de force sur le pointage
3.1 Introduction : améliorer la vitesse de pointage
Du fait des interfaces WIMP (Windows, Icons, Menu, Pointing Devices), une grande partie de l’interaction avec les ordinateurs est actuellement effectuée à l’aide de la souris. La tâche typique est :
- repérage de la cible
- déplacement de la souris au dessus de la cible
- clic sur la cible
La cible pouvant être une icône, un élément d’un menu, une partie d’une fenêtre. Les moyens quantitatifs avec lesquels nous pouvons évaluer les performances motrices humaines lors d’une tâche d’acquisition de cible sont basés sur les recherches de Fitts (voir 1.3.2.1).
Pour rappel, la loi de Fitts énonce que le temps du mouvement \(T\) requis pour sélectionner une cible de taille \(W\) situé à une distance \(A\) est : (Fitts, 1954)
\[ MT=a+b\log_{2}(A/W+1)\]
Le problème de l’amélioration du temps de pointage est un domaine de recherche actuellement très actif. On pourra se rapporter à (Balakrishnan, 2004) pour une étude exhaustive des moyens employés pour diminuer ce temps. En considérant l’équation (3.1), réduire \(MT\) peut s’obtenir en diminuant la distance \(A\), en augmentant la taille \(W\), ou adaptant les deux en même temps.
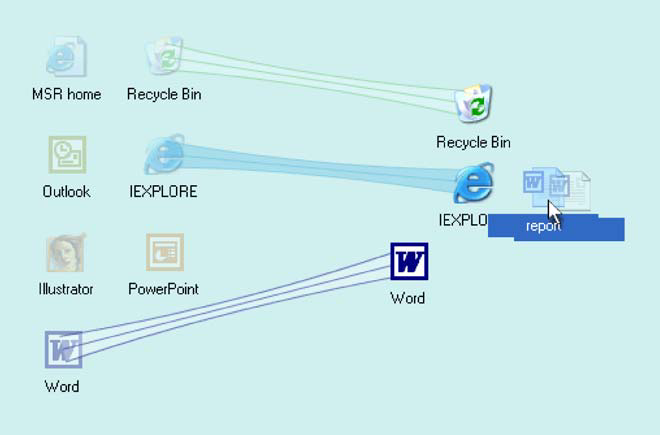
Par exemple, pour diminuer la distance \(A\), on peut utiliser des menus circulaire (pie menus). (Callahan et al., 1988) ont comparé ces menus aux traditionnels menus linéaires que l’on retrouve dans tous nos systèmes d’exploitation, et a observé une amélioration des temps de pointage de 15 à 20%. (Baudisch et al., 2003) ont, quant à eux, proposé de diminuer temporairement cette distance, en étirant les icônes cibles vers le curseur de la souris (figure 3.1).
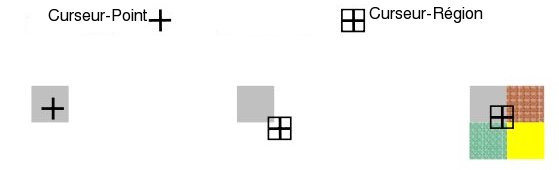
Pour augmenter la taille de la cible \(W\), il y a eu plusieurs façons de faire : (Worden et al., 1997) ont proposé l’utilisation d’un curseur-région (figure 3.2), à l’inverse d’un curseur-point tel que nous utilisons en manipulant notre souris. Il y a aussi la possibilité de dilater la cible à l’approche du curseur (McGuffin and Balakrishnan, 2002), à l’instar de ce qui se passe sur la barre d’application (le Dock) du système MacOSX d’Apple.
Enfin, (Blanch et al., 2004) ont joué sur l’adaptation du gain entre l’espace moteur et l’espace visuel (Control-Display gain). Ce gain augmente quand le curseur s’approche d’une cible, et diminue lorsqu’il s’en éloigne. Le curseur semble alors magnétisé par la cible : il est facile de l’atteindre, et difficile de la quitter. Pourtant, ils ont également noté qu’une telle technique perdait tout son intérêt en présence de distracteur(s) entre la position initiale du curseur et la cible à atteindre, chaque distracteur attirant le curseur.
Cette notion de distracteurs va revenir dans notre approche, comme nous allons le voir.
3.2 Travaux antérieurs intégrant le retour d’effort dans une tâche de pointage
Plusieurs études ont évalué l’utilisation de périphériques haptiques dans une tâche de pointage, en particulier pour interagir avec un bureau virtuel.
Dans un premier temps, cependant, nous citons les résultats obtenus dans le domaine de la simulation physique. Pour rappel, ce fut 2.5.1">un des domaines précurseurs dans recherche sur l’interaction haptique. Et dans ce contexte, l’apport du retour de force est flagrant en terme d’efficacité. Avec le retour de force, il est 30% plus rapide de placer une molécule correctement, et les trajectoires moléculaires sont 41% plus courtes (Brooks Jr et al., 1990).
Retrouvons maintenant nos tâches de pointage dans un environnement virtuel…
En 1996, Akamatsu et MacKenzie (Akamatsu and MacKenzie, 1996) ont étudié une souris tactile à retour de force. Ils ont montré des réductions significatives du temps de mouvement \(MT\) lorsque la modalité tactile est employée. L’effet est particulièrement prononcé pour les petites cibles. Cependant, ils ont également noté une augmentation du taux d’erreur. De plus, l’emploi de la modalité kinesthésique seule ne fait pas baisser significativement les temps d’acquisition d’une cible. Enfin, l’ indice de performance \(IP\) lors de l’emploi du retour de force n’est pas significativement différent de celui observé sans retour de force.
Eberhardt (Eberhardt et al., 1997) et Hasser (Hasser et al., 1998) ont étudié, les effets de bassins d’attraction autour des cibles. Ces bassins amènent le pointeur de la souris au centre de la cible. Dans ces cas, les performances observées lors d’une tâche de pointage sont réellement meilleures (de l’ordre de 25%) que sans retour de force.
Pour Wall, l’étude s’est focalisé sur l’indice de performance \(IP\) (soit l’inverse de la pente de régression linéaire) au cours d’une tâche de pointage effectuée avec un PHANTOM (Wall and Harwin, 2000). En 2000, il a ainsi retrouvé les résultats de Akamatsu et MacKenzie, à savoir que le retour de force, bien qu’améliorant les temps d’acquisition des cibles, n’a pas d’effets sur l’indice de performance \(IP\). Par contre, pour les mouvements balistiques (\(IP\)<3bits), ils ont montré une amélioration significative de l’indice de performance de la tâche.
Enfin, Dennerlein a également étudié l’apport du retour de force. Dans une première étude (Dennerlein et al., 2000)) réalisé en 2000, c’est le suivi de courbes. Le retour de force prenait la forme d’une attraction du curseur sur la courbe grâce à une sorte de tunnel haptique. Il s’est avéré que les mouvements effectués avec un retour de force étaient 52% plus rapides que sans. Dans une deuxième étude, (Dennerlein and Yang, 2001) se sont intéressés aux mouvements d’acquisition de cibles. Pour le retour de force, généré par une souris, c’est le concept de bassins d’attractions autour de la cible qui a été retenu. Les résultats sont similaires à ceux de Eberhardt et d’Hasser : une amélioration de 25% des performances est observée avec l’utilisation du retour de force. Il a également montré que cette différence s’amoindrissait lorsque d’autres bassins d’attraction haptiques étaient générés, en plus de celui généré par la cible. Enfin, son étude montrait que le confort perçu lors d’une tâche de pointage était meilleur avec un retour haptique.
En conclusion, il apparaît que le retour de force tend à améliorer les performances. Les temps d’acquisition d’une cible s’améliorent de 25% lorsque le champs de force agit au delà de la cible; par contre, lorsque la force n’est déclenchée qu’au survol de la cible, les temps ne sont pas significativement différents. De plus, dans le cas de perturbations issues d’autres cibles potentielles qui génèrent leur propre retour de force, comme dans le cas d’un bureau haptiquement augmenté (par exemple l’immersion haptic desktop (“Immersion corporation,” n.d.)), les performances baissent.
Nous allons maintenant étudier comment ces perturbations influent sur les performances, dans le cas d’un retour de force restreint à la cible, et avec un espace de travail entièrement rempli de distracteurs haptique (cas qui pourrait se retrouver avec le bureau visible sur la figure 3.3.
3.3 Protocole de test
3.3.1 Sujets
Neuf sujets volontaires (8 hommes et 1 femme, âgés de 21 ans à 40 ans) ont participé au test. Tous les sujets sont familiers avec l’utilisation d’une souris; deux d’entre eux avait déjà utilisé une souris à retour de force.
3.3.2 Matériel
Nous utilisons la souris à retour de force Wingman Force Feedback Mouse (Figure 2.22) conçue par (“Immersion corporation,” n.d.) et commercialisée par Logitech.
La manipulation d’un périphérique de pointage à retour de force, comme notre souris, est basée sur la perception kinesthésique du bras, de la main et des doigts. La perception cutanée n’est que peu stimulée dans cette interaction. En d’autres mots, ici, il ne s’agit pas de ressentir une texture.
L’ ordinateur utilisé est un PC 1GHz. Les données ont été collectées par le serveur (Apache 2 tournant sur un PC à 733 Mhz) sous forme de feuilles de calcul. Les sujets sont accompagnés par un expérimentateur durant toute la durée du test.
3.3.3 Procédure
Pendant l’expérience, chaque sujet doit aller cliquer sur un petit rond en haut à droite de l’écran : l’origine. Une fois le clic effectué sur l’origine, une cible hexagonale apparaît à l’écran. Il lui faut aller cliquer le plus vite possible sur cette cible. Le sujet peut préparer son geste aussi longtemps qu’il le souhaite, tant que le curseur de la souris ne quitte pas l’origine. Quand il a cliqué sur la cible, celle-ci disparaît et il doit retourner à l’origine afin de générer une nouvelle cible.
L’ensemble de l’expérience est divisée en 4 phases, correspondants à 4 conditions de retour haptique :
- condition MT : aucun retour de force.
- condition MTF : un champs de force se déclenche quand le curseur de la souris passe au dessus de la cible. À ce moment, la souris est attirée au centre de la cible.
- condition MTDF : l’ensemble de l’écran est une mosaïque hexagonale. Lorsqu’il est survolé par le curseur, chaque hexagone déclenche un champs de force attirant le périphérique en son centre.
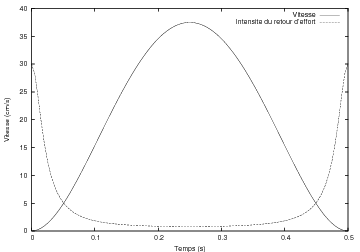
- condition MTDFH : même chose que la condition MTDF, mais l’intensité du retour de force dépend de la vitesse de la souris selon la loi \[ Intensit\acute{e}=\frac{Intensit\acute{e}\_{max}}{vitesse+1}\]
L’intensité sera ainsi plus faible lorsque la vitesse de la souris est élevée (voir figure 3.4).
Il y a 10 cibles différentes. Chacune est présentée 4 fois au sujet par phase. Ainsi, chaque sujet aura 160 mouvements origine-cible à réaliser pour un ensemble de 1440 mouvements pour l’ensemble des sujets.
Les paramètres de l’expérience sont résumés dans la table 3.1.
| DISTANCES À LA CIBLE | 21, 72, 92, 138, 205, 233, 415, 586, 831, 938 pixels |
| TAILLE DE LA CIBLE | 40 pixels |
| CONDITIONS EXPERIMENTALES | * MT : sans retour de force, |
| * MTF : retour de force sur la cible, | |
| * MTDF retour de force sur le damier, | |
| * MTDFH : retour de force adaptatif sur le damier |
Ces conditions forment un ensemble homogène de tâches de pointage. Dans ce protocole de test, nous utilisons la formulation de l’indice de difficulté de la tâche proposée par MacKenzie [MacKenzie (1992) :
\[\begin{equation} ID=\log_{2}(A/W+1) \tag{3.1} \end{equation}\]
où \(A\) est la distance à la cible, et \(W\) la taille de la cible (en l’occurrence sa largeur). En utilisant l’équation (3.1), nous obtenons des indices de difficultés compris entre :
\[ ID\_{min}=\log_{2}\left(\frac{21}{40}+1\right)=0.61bits\]
et
\[ ID=\log_{2}\left(\frac{938}{40}+1\right)=4.61bits\]
Au final, l’interface de l’expérimentation est présentée sur la figure 3.5. (nous noterons que le choix de l’interface provient de nos recherches sur la représentation instantanée de la musique, voir la section Application à la musique : Music’Haptic.

3.4 Résultats et discussion
L’analyse de la variance (ANOVA) sur les temps de pointage, permet de nous prononcer sur la significativité des facteurs jouant sur nos mesures : les différentes conditions expérimentales et l’indice de difficulté. Il apparaît que le facteur conditions expérimentales est très significatif (F9,39=24.96, p<0.0001), ainsi que le facteur indice de difficulté (F3,39=10.3, p<0.0001). De plus, les deux facteurs n’influent pas l’un sur l’autre (F27,39=0.35, p=1.0000).
Les moyennes des temps pour les 4 conditions de retour haptique sont dans le tableau 3.2.
| MT | MTF | MTDF | MTDFH |
|---|---|---|---|
| 585 ms | 584 ms | 723 ms | 676 ms |
| - | (−0,2%) | (+23,6%) | (+15,6%) |
Nous pouvons déjà observer qu’il n’y a pas de différence significative entre cliquer sur une cible sans retour de force (MT) et avec retour de force (MTF). Ceci rejoint les observations de Akamatsu (Akamatsu and MacKenzie, 1996) et s’explique par le fait que le retour de force sur la cible n’est activé que lorsque le pointeur s’y trouve, à la différence d’autres expériences qui élargissaient le bassin d’attraction au delà de la taille de la cible (Hasser et al., 1998) (Eberhardt et al., 1997) (Wall and Harwin, 2000). Par contre, le fait qu’il y ait des champs de force entre l’origine et la cible (MTDF et MTDFH) génère une hausse significative des temps (respectivement +23,6% et +15,6% par rapport au mouvement sans retour de force). Enfin, l’adaptation du retour de force sur la vitesse du curseur permet de réduire cette perte de performance de 6,5% .
Nous aurions pu espérer une amélioration plus nette des temps de pointage dans la condition MTDFH. Cependant, Le modèle d’impulsion initiale nous apporte une explication possible : Le geste le plus fréquent lors d’une tâche d’acquisition de cible consiste en un premier mouvement initial qui peut dépasser ou ne pas atteindre la cible, suivi de plus petits mouvements correctifs pour parvenir réellement sur la cible. Avec notre retour de force adaptatif, le geste de pointage pouvait se retrouver « emprisonné » sur une zone proche de la cible.
Les régressions linéaires sur les moyennes des données nous donnent les coefficients de régression linéaire de l’équation (3.1) pour les différentes conditions de retour haptique. Ainsi, la table 3.3 présente les différents modèles de la loi de Fitts selon ces conditions. Chaque modèle a été calculé en effectuant une régression linéaire entre les 10 indices de difficulté (ID), calculé en utilisant l’équation (3.1), et les temps observés.
| Conditions | Modèle de la loi de Fitts | \(R^2\) |
| MT | \(MT=0,25+0,122ID\) | 0,93 |
| MTF | \(MT=0,25+0,120ID\) | 0,91 |
| MTDF | \(MT=0,38+0,123ID\) | 0,96 |
| MTDFH | \(M*=0,31+0,130ID\) | 0,90 |
Les différentes conditions ne diffèrent de manière significative que de par leurs ordonnées à l’origine. Les pentes de chaque modèle sont très proches. Enfin, nous pouvons noter, grâce aux valeurs élevées des R² que la loi de Fitts explique plus de 90% des variations dans les observations.
Nous pouvons maintenant tracer la synthèse des mesures de notre expérience (figure 3.6).
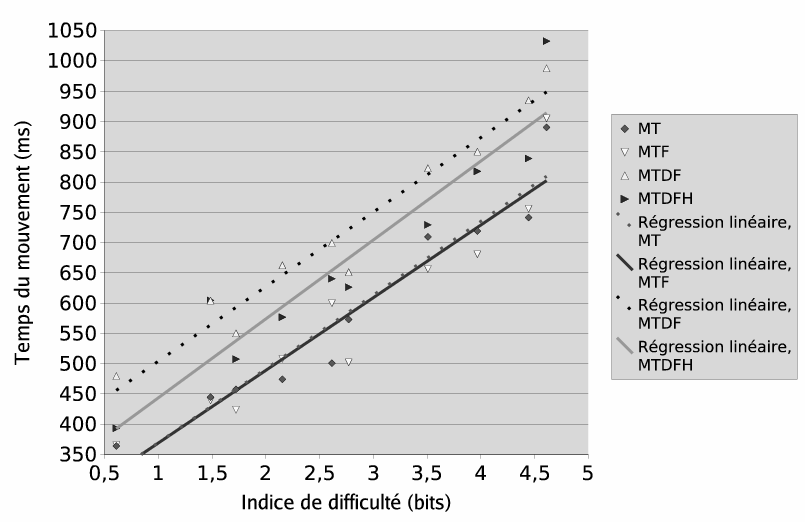
La méthode statistique de Bonferroni permet de grouper les observations en groupes significativement différents. Dans notre cas, cette méthode regroupe les observations MT et MTF en un premier groupe non-significativement différent, et les conditions MTDF et MTDFH en un deuxième. Notre proposition d’adapter le retour haptique à la vitesse de la souris (condition MTDFH) n’apparaît donc pas significativement différent de la condition sans adaptation (p>0.15).
3.5 Conclusion
Il est donc apparu que le retour de force pouvait améliorer les performances, mais dans des cas peu applicables à des situations complexes : une seule cible haptiquement augmentée. Dans le cas d’une multiplication des cibles potentielles, le retour haptique devient même un facteur de perte de performances. Dans notre cas, les temps de pointage ont augmenté de 23% lorsque l’écran est compétement rempli de distracteurs haptiques.
Nous avons proposé ici un retour de force adaptatif, calculé en fonction de la vitesse courante du pointeur. Les performances s’améliorent alors de 6,5%.
Pour aller plus loin, nous pouvons imaginer tester d’autres adaptation dynamiques des forces, basées sur l’accélération du curseur, par exemple. De plus, nous pourrions tester des zones d’attirance englobant plusieurs cibles, et ce, de manière à éviter au curseur de tomber dans une mauvaise cible.
Notons que dans un contexte d’accessibilité, l’intérêt de l’utilisation de dispositifs à retour de force a déjà été prouvé, par exemple auprès de personnes handicapés moteurs (Keates et al., 2002).
Au final, cette étude nous a permis d’étudier la partie action du mode haptique, et plus précisément les gestes déictiques (McNeill, 1992). Dans tout ce chapitre, en effet, il s’agissait d’utiliser une souris à retour de force dans un registre classique pour une souris : le pointage. Le retour de force essayant d’améliorer la vitesse de pointage.
Dans la seconde partie de cette thèse, nous allons passer aux gestes épistémiques de (Cadoz, 1994), c’est à dire aux gestes effectués pour prendre des connaissance du monde extérieur. Ce sont ces gestes, et leurs retours de forces associés, qui vont nous permettre d’envisager une utilisation de la modalité haptique, dans un but d’accessibilité des personnes non-voyantes aux documents numériques.