Chapitre 2 Communications Homme-Machine
2.1 Introduction
Maintenant que nous avons passé en revue les définitions et concepts propres à l’humain, en matière de perceptions et d’actions basées sur les sensations haptiques, nous allons étendre dans ce chapitre, notre étude à la machine : nous allons donc glisser vers le domaine de l’interaction Homme-Machine, ou IHM.
Pour commencer, seront posées les principales définitions du domaine de l’IHM. La section suivante présentera les modélisations de l’utilisateur, dans un système interactif. Dans les deux parties suivantes, nous présenterons les moyens techniques d’interaction, basée sur la sensation haptique, d’abord dans le sens humain-machine (en entrée du système), puis dans le sens machine-humain (en sortie, donc).
Nous terminerons ce chapitre en présentant l’intégration du mode haptique au sein des systèmes interactifs, puis les applications existantes, mettant en œuvre cette interaction haptique.
2.2 les systèmes interactifs
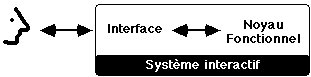
Un système interactif est une application informatique qui prend en compte, au cours de son exécution, d’informations communiquées par le ou les utilisateurs du système, et qui produit, au cours de son exécution, une représentation perceptible de son état interne (Beaudouin-Lafon, 1997).
Un système interactif est généralement composé de deux parties : l’interface utilisateur et le noyau fonctionnel (2.1). L’interface utilisateur est constituée des éléments logiciels et matériels qui sont mis en œuvre lors de la capture des entrées de l’utilisateur et lors de la restitution des sorties du système. Le noyau fonctionnel représente le système de traitement et de stockage de l’information.
Il est possible de modéliser un système interactif suivant plusieurs points de vue, selon que l’on s’intéresse au domaine de l’application, à l’architecture logicielle ou aux aspects ergonomiques et cognitifs entrant en jeu dans l’utilisation du système. La figure 2.2 reflète différentes approches que l’on peut avoir d’un système
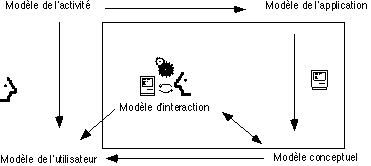
Chacun des modèles présentés correspond à une vue que peut se former un observateur en fonction de son rôle dans l’élaboration.
- Le commanditaire du système est principalement préoccupé par l’activité (ou la tâche) que le système aidera à effectuer.
- Le concepteur de l’application a pour objectif de spécifier un système logiciel correspondant au modèle de l’activité.
- Le concepteur de l’interface propose une représentation des objets et des méthodes d’interaction efficaces et compréhensibles pour l’utilisateur, en fonction de l’application (modèle conceptuel) et du système informatique utilisé (modèle d’interaction).
- Enfin, l’utilisateur utilise un système en fonction de ses connaissances du domaine (activité) et du système (modèle d’interaction et modèle conceptuel de l’application).
Posons maintenant la terminologie de ce domaine.
2.2.1 L’Interaction et l’Interface Homme-Machine
L’interaction homme-machine désigne l’ensemble des phénomènes physiques et cognitifs qui interviennent dans la réalisation de tâches avec le concours de l’ordinateur.
L’interface homme-machine désigne un assemblage de composants logiciels et matériels qui permet l’accomplissement de tâches avec le concours de l’ordinateur.
Les composantes de l’interaction homme-machine sont :
- L’utilisateur
- accomplit une tâche
- dans un contexte particulier
- en utilisant un système informatique.
2.2.2 Quelques définitions de la communication multimodale
Les définitions qui font référence sont le fait de (Coutaz and Caelen, 1991).
Mode de communication : D’après le petit robert, un mode est une norme particulière sous laquelle se présente un fait, s’accomplit une action. En grammaire, le mode est un trait dénotant la manière dont le locuteur présente le procès (on dit plus couramment action). Du point de vue système, un mode représente l’état dans lequel le système s e trouve à un moment donné. Un mode fait référence aux cinq sens de l’être humain : le toucher, l’ouïe, la vue, l’odorat, le goût (réception d’information), et aux différents moyens d’expression humains : le geste, la parole (émission d’information). Il définit la nature des informations servant pour la communication (mode visuel, mode sonore, mode gestuel etc.).
Modalités : Une modalité est une forme concrète particulière d’un mode de communication. Par exemple, le bruit, la musique, la parole sont des modalités du mode sonore.
Média : Dans la vie courante, un média désigne un support d’information (journal, disque audio…). En informatique, un média peut également être un support (vidéodisque, CD-ROM…), mais actuellement, par extension, il désigne le dispositif physique qui acquiert ou qui diffuse l’information : un écran vidéo, un système de synthèse de parole… Dans un sens large, les médias désignent les différents périphériques d’ordinateur (plutôt non conventionnels) qui permettent la communication, en entrée comme en sortie.
Communication multimodale : une communication est dite multimodale si elle fait intervenir plusieurs modes de communications dans les échanges d’information. Cependant, en informatique, ce qualificatif s’applique également pour les communications ne faisant intervenir qu’un seul mode mais avec plusieurs modalités.
Système multimodal : théoriquement, un système informatique multimodal est un système capable d’intégrer plusieurs modes de communication. Cependant, on désigne également par ce nom tout système capable d’intégrer plusieurs modalités de communication (même s’il n’intègre qu’un seul mode).
Multimodalité : le terme de multimodalité fait référence à l’usage de plusieurs modalités pour la réalisation d’une même tâche.
Multimédia : un système informatique multimédia est un système capable d’acquérir et/ou de restituer, par l’intermédiaire des médias, des informations de natures et/ou de formes différentes (parole, musique, image vidéo, etc.).
Ces trois notions sont dépendantes les unes des autres. En effet, à un mode correspond un ensemble de modalités et à une modalité est rattaché un ensemble de média permettant son expression.
Exemple : La modalité « Vibration » s’exprime par exemple sur le médium « Vibreur » et fait appel au mode Tactile .
2.2.3 Les interfaces informatiques actuelles : les interfaces WIMP
Dans le champs de recherche de l’Interaction Homme-Machine (IHM), l’acronyme WIMP signifie Windows, Icons, Menus, Pointing pour fenêtres, icônes, menus et pointage. Il s’agit des interfaces graphiques que nous utilisons le plus souvent devant un ordinateur. Les interfaces WIMP ont été imaginées et développées au Xerox PARC en 1973 et ont été popularisée avec le Macintosh en 1984.
En anglais populaire, le terme WIMP est couramment utilisé pour insulter les personnes qui manquent de force et/ou de courage. Cet usage était courant avant l’arrivée des interfaces graphiques. Maintenant, il arrive que WIMP soit utilisé d’une manière dénigrante, en particulier par les personnes qui préfèrent les interfaces traditionnelles comme les interfaces à ligne de commande.
On parle enfin d’interface POST-WIMP pour les interfaces qui se basent sur d’autres paradigmes d’interaction (Van Dam, 1997).
2.3 Les modèles de l’utilisateur
2.3.1 Le modèle du processeur humain et les caractéristiques du corps humain
Dans leur modèle, The Model Human Processor , S. Card, T. Moran et A. Newell représentent l’individu comme un système de traitement d’informations régi par des règles (Card et al., 1983). Le processeur humain comprend trois sous-systèmes interdépendants : les systèmes sensoriel, moteur et cognitif. Chacun d’eux dispose d’une mémoire et d’un processeur dont les performances se caractérisent à l’aide de paramètres (figure 2.3).
Pour une mémoire, les paramètres essentiels sont :
- µ (ou m), la capacité: le nombre d’éléments d’information mémorisés ;
- δ (ou d), la persistance : temps au bout duquel la probabilité de retrouver un élément d’information est inférieure à 0,5 ;
- κ (ou k), le type d’information mémorisée (physique, symbolique, etc.).
Pour un processeur, le paramètre important est
- τ (ou t), le cycle de base qui inclut le cycle d’accès à sa mémoire locale.
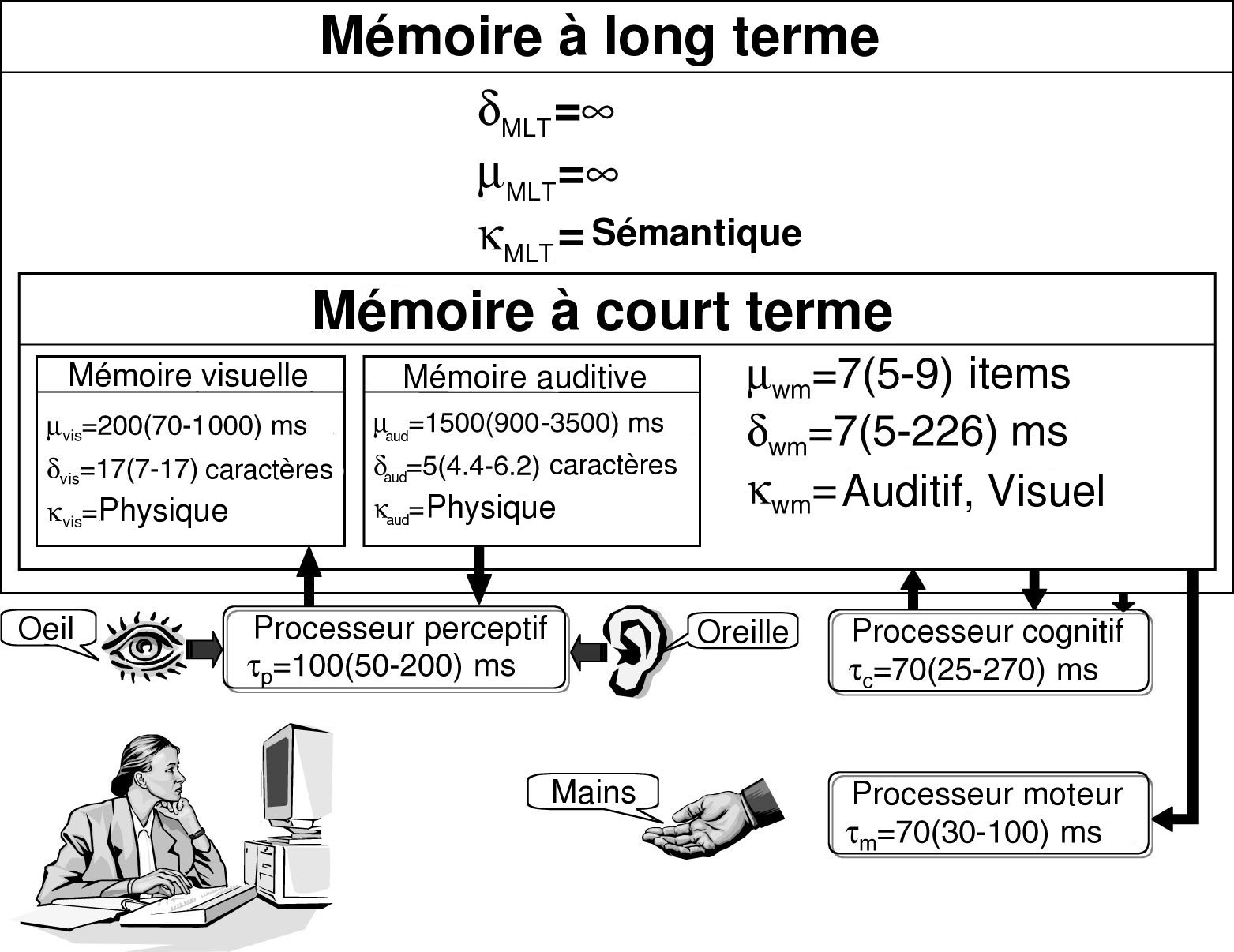
Ce modèle nous donne un certain nombre d’informations sur la mémoire à court terme :
- nous mémorisons 7 items (± 2 selon l’individu, la fatigue…) ;
- nous regroupons les mnèmes (ie les unités d’information) par motifs visuels, acoustiques, perpétuels ;
- lors d’une recherche d’information, celle-ci a lieu de manière séquentielle ;
- enfin, l’oubli de la mémoire à court terme est de l’ordre de 15 à 30 secondes.
Et ceci peut se retrouver dans une conception des interfaces de systèmes interactifs :
- limiter les items de menus à 7
- établir des liens entre éléments (couleurs, format, emplacements) pour faciliter le filtrage cognitif
- écrire des messages concis
- ne pas présenter d’informations inutiles
2.3.1.0.1 Par rapport au système moteur
Outre le modèle de l’homonculus déterminé expérimentalement, le modèle du processeur humain propose une mesure quantitative des performances motrices humaines en fonction des organes considérés. Il est ainsi possible de déterminer les principales zones fonctionnelles de l’être humain par ordre d’importance et d’utilité dans l’interaction (extrait de (Baudel, 1995)):
- la main dominante, constituée des 5 doigts et de la paume, présente 23 degrés de liberté (sans les poignets). Ces degrés ne sont bien sûr pas interdépendants. La main et les doigts sont les organes les plus utilisés et vraisemblablement les plus utiles à l’interaction.[…] (Sturman, 1992).
- la main non dominante, identique à la main dominante, mais ayant un contrôle moteur moins précis.
- les lèvres et langue, les muscles faciaux présentent un grand nombre de degrés de liberté utilisés de façon très subtile dans la communication humaine. Ces degrés de liberté sont cependant difficilement exploitables : ils sont déjà utilisés pour la communication vocale, leur emploi est fortement stéréotypé, dépendante du milieu socioculturel et sont difficile à interpréter. […]
- les poignets et bras (coude): Le poignet est lié à la main et ne peut être utilisé indépendamment de celle-ci lorsqu’elle est déjà mise à contribution. Certaines machines-outils utilisent le coude comme moyen d’actionnement d’interrupteurs.
- les pieds : Que ce soit en position assise ou debout, le pied est assez précisément contrôlable et peut être utilisé […] (pédalier de l’orgue […] contrôle du volume ou du vibrato sur un harmonium ou un orgue électronique, accélérateur d’une voiture…). De nombreux outils et instruments utilisent des pédaliers et des pédales à course pour remédier à l’occupation des membres supérieurs par d’autres contrôles. De plus, le pied peut être utilisé lorsque la force requise pour actionner un effecteur doit être assez importante.
- les jambes : Les jambes ne peuvent être facilement utilisées lorsque le pied est mis à contribution. Certaines machines outils utilisent cependant des interrupteurs activés par le genou.
- le tronc présente autant de degrés de liberté qu’il y a de vertèbres et de côtes, mais ces dimensions sont assurément difficiles à utiliser activement dans l’interaction avec un ordinateur. Tout au plus une mesure de l’état général de relâchement du corps peut-il indiquer une fatigue de l’utilisateur et une baisse de son attention.
2.3.2 Autres modèles de l’utilisateur
GOMS (Goal, Operator, Method, Selection) (Card et al., 1983) se contente de modéliser le comportement observable de l’utilisateur (approche béhavioriste) et ne cherche pas à décrire les états mentaux et les traitements internes (approche cognitiviste). KeyStroke (Card et al., 1983) est une version simplifiée de GOMS. Il permet de prédire le temps d’exécution de cette tâche par un utilisateur expert. On suppose que la méthode est unique, on ne prend pas en compte l’opération de choix s’il y a plusieurs méthodes candidates pour le même but.
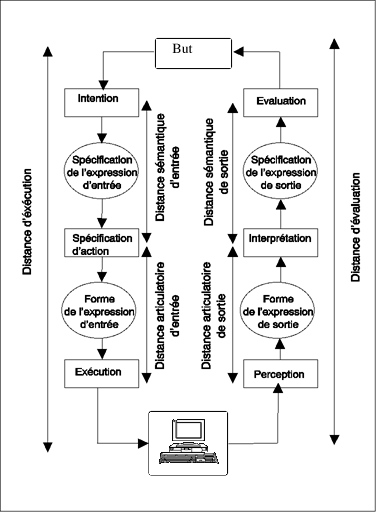
La théorie de l’action (Norman, 1988) est une approche cognitiviste de la modélisation de l’utilisateur : l’individu élabore un modèle conceptuel du système informatique. Le comportement est conditionné par l’environnement et par la représentation interne que l’utilisateur se fait du système. La figure 2.5 illustre ce modèle de l’action. Le point fort de cette approche est qu’elle permet d’expliquer les réussites, difficultés et erreurs de l’utilisateur.
2.4 Les périphériques d’entrée
2.4.1 Petit point historique
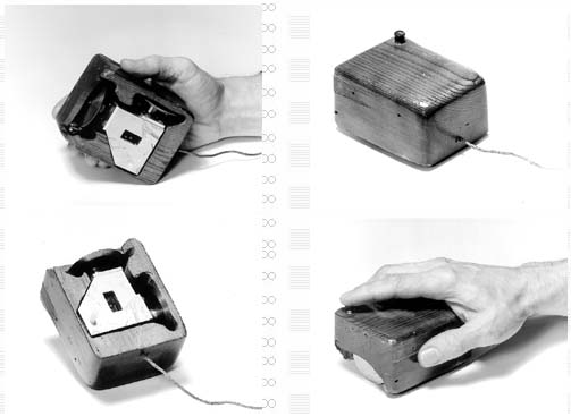
Pour manipuler un point dans l’espace virtuel de la mémoire de l’ordinateur, nous avons besoin d’un dispositif dit de pointage. Le plus commun de ces dispositifs, c’est la souris. La figure 2.6 montre la première souris de l’histoire, créée par Douglas Engelbart et William English en 1964.
2.4.2 Taxonomie des périphériques d’entrée
Comment classer les différents périphériques qui ont été imaginés pour interagir avec l’ordinateur ?
Certains périphériques sont conçus pour un mode d’utilisation reposant sur un changement d’états discrets : par exemple, une touche est enfoncée ou non ; ou encore, la position d’un capteur est une valeur entière comprise entre 1 et 10. Ce sont les périphériques à états discrets. Le clavier en est l’exemple type.
D’autres périphériques, comme la souris, sont dénommés à entrée continue. Ils produisent un échantillonnage, ou une trace du geste réalisé pour actionner le périphérique.
Les premières classifications des périphériques d’entrée sont le fait de Foley, Wallace et Chan (Foley et al., 1984) et de Buxton (Buxton, 1983). Foley et ses collègues se sont basés sur les tâches graphiques que chaque périphérique est capable de réaliser. Buxton a classifié les périphériques d’entrée selon leurs propriétés physiques et leur nombre de degrés de libertés. Finalement, Card et ses collègues (Card et al., 1991) ont repris la classification de Buxton et l’ont étendue à l’ensemble des périphériques à degrés de liberté continus et discrets. Dans un premier temps, le tableau 2.1 récapitule les grandeurs que l’on utilise pour classer les périphériques à retour d’effort, selon la nature des degrés de liberté.
| Degrés de liberté | |||
| Linéaire | Rotatif | ||
| Position | absolue | Position P | angle R |
| relative | mouvement δ P | delta angle δ R | |
| Force | absolue | Force F | couple T |
| relative | delta Force δ F | delta couple δ T |
Table 2.1 : Inventaire des grandeurs mesurables sur un périphérique d’entrée continu en fonction de la nature du degré de liberté
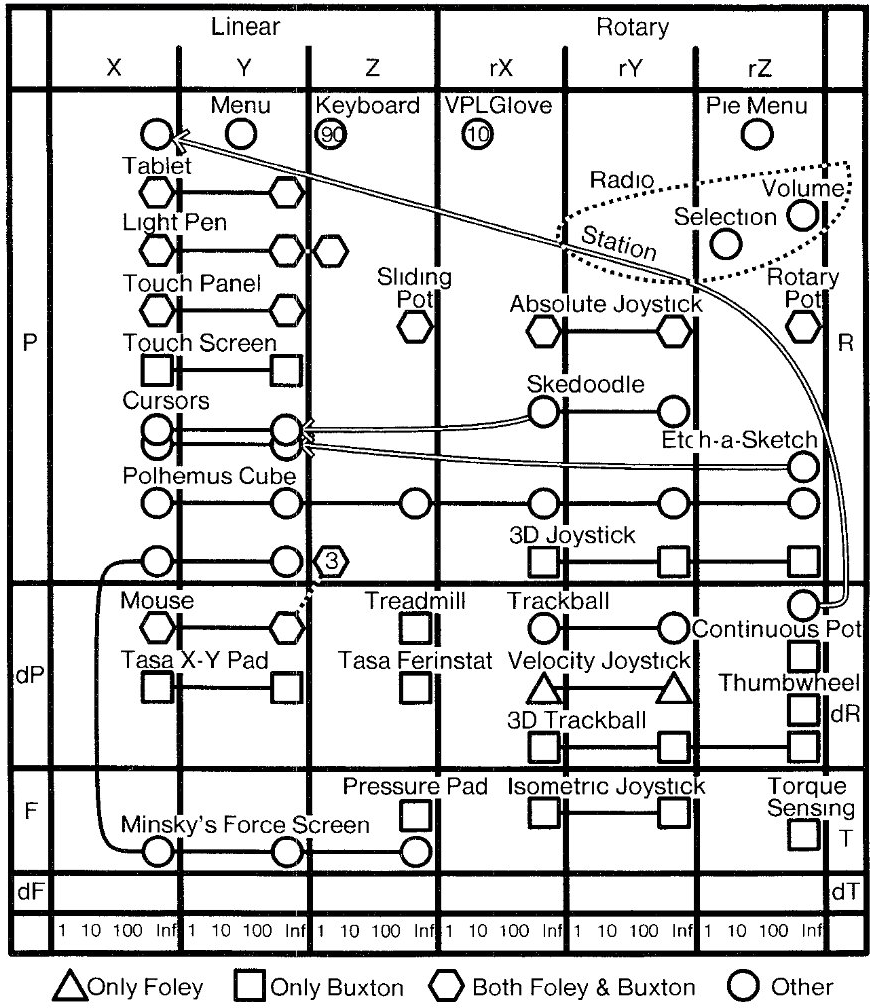
Le modèle de (Card et al., 1991) se propose de placer les périphériques d’entrée dans un espace permettant de les comparer. Le nombre de dimensions de cet espace n’est pas fixé. Tout critère de comparaison entre deux dispositifs peut en fournir une. Les dimensions les plus importantes sont le nombre et le type des degrés de liberté des dispositifs d’entrée considérés. Le tableau suivant est constitué de 5 axes :
- dispositif de translation ou de rotation.
- dimension de l’espace (x, y, z ou lacet, tangage et roulis) captée.
- déplacement absolu ou relatif.
- capteur de mouvement ou de force.
- résolution (entre 1 bit et l’infini).
La figure 2.7 reprend la taxonomie de (Card et al., 1991), ainsi que celle de chacun de ses prédécesseurs.
2.4.3 Les performances en entrée des périphériques de pointage
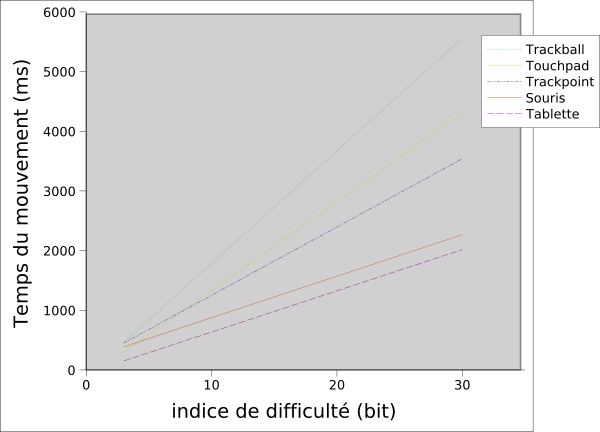
Pour évaluer les performances des dispositifs de pointage, les recherches ont souvent utilisé la loi de Fitts (voir 1.3.2.1). La figure 2.8 montre les performances de différents dispositifs de pointage selon la loi d’Accot (voir par :La-loi-d’Accot).
La tâche effectuée et l’interprétation de ce graphique
Les sujets devaient aller pointer le plus vite possible, différentes cibles placées sur un cercle. La figure 2.10 précise l’ordre des mouvements à réaliser.
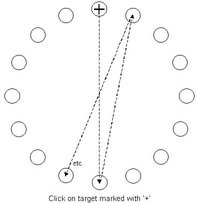
Sur le graphique de la figure 2.9, on retrouve bien le fait que la souris est bien plus efficace que les autres dispositifs de pointage. Il y a également un effet d’apprentissage qui apparaît (le temps du mouvement diminue au fur et à mesure de l’expérience), mais ce n’est pas le sujet de notre discussion.
Enfin, d’un point de vue ergonomique, (Zhai et al., 1996) a démontré que les périphériques d’entrée manipulés avec les doigts, obtiennent de meilleures performances lors d’une tâche de pointage, que les dispositifs qui nécessitent la mise en action du poignet et/ou du coude et/ou de l’épaule.
Ceci doit nous amener à inciter les utilisateurs à se placer dans une position leur intimant d’utiliser la précision de leurs doigts, avec le bras le plus reposé possible.
Le geste dans les systèmes interactifs
(Baudel, 1995) a relevé trois paradigmes d’utilisation du canal haptique en entrée dans les systèmes interactifs. Il a défini l’entrée haptique comme tout mode d’interaction faisant intervenir les divers modes d’action liés aux sens haptiques . Ce que nous pouvons considérer comme le geste vers la machine .
2.4.3.1 Entrée haptique simple
(Baudel, 1995) parle d’entrée haptique simple lorsque la sémantique d’une action est entièrement décrite par des changements d’état discrets du dispositif.
Par exemple, pour tracer un rectangle avec une souris, le bouton enfoncé fournit une première position d’ancrage, le relâchement une deuxième. Ces deux positions suffisent à elles seules à fournir les paramètres de création du rectangle ; la façon avec laquelle l’utilisateur déplace la souris n’a pas d’incidence sur la signification engendrée par le geste.
2.4.3.2 Reconnaissance de marques et de tracés
On appelle reconnaissance de marques et de tracés, la prise en compte de la trajectoire réalisée avec le dispositif de pointage.
Dans l’exemple du rectangle, on peut imaginer une autre façon de faire : avec la souris, on peut tracer directement les 4 côtés du rectangle. Le système se chargera de paralléliser les tracés forcément approximatifs, en fonction de ce qu’il a reconnu.
Cette technique possède un autre avantage : il n’y a plus de déclaration d’intention. Dans notre exemple, il n’est plus nécessaire de choisir l’outil dessine un rectangle puis de le tracer ; on peut dessiner directement.
La reconnaissance de marques, ou de tracés, permet d’enrichir la sémantique des actions élémentaires de l’utilisateur.
Ce type d’interaction est déjà utilisé dans quelques applications. Par exemple, le navigateur internet Opera, dispose d’une reconnaissance de marques. Par exemple, un geste avec la souris vers la gauche, tout en maintenant le bouton du milieu enfoncé, rechargera la page précédente.
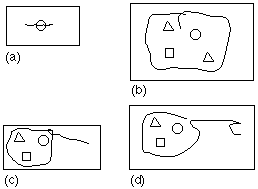
Dans un éditeur d’objets en deux dimensions, (Kurtenbach and Buxton, 1991) ont utilisé toute une variété de gestes qui simplifiaient la sélection, l’effacement, le déplacement ou la duplication d’un objet ou d’un groupe d’objets. La figure 2.11 présente ces gestes. Par exemple, effacer un objet est réalisé en barrant cet objet (a) ; effacer un groupe d’objets consiste en dessinant une zone autour de ces objets puis en terminant le tracé à l’intérieur de cette zone (b) ; le déplacement d’objets commence comme l’effacement de groupe, mais le tracé se termine à l’extérieur du tracé, à l’endroit où l’on souhaite déplacer ce groupe (c) ; enfin, le geste de copie (d) consiste en un geste circulaire autour des objets à sélectionner, terminé par un c .
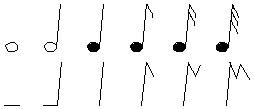
Pour les artistes, l’entrée gestuelle peut faciliter l’interaction créative. (Buxton, 1995) a montré un simple ensemble de gestes pour transcrire la notation musicale. Comme montré sur la figure 2.12, les formes des notes les plus communes (en haut de la figure) trouvent un équivalent dans l’ensemble des gestes à réaliser (sous chaque note).
2.4.3.3 Interaction gestuelle pure
Toujours pour (Baudel, 1995), la reconnaissance de tracés reste limité à reconnaître l’échantillonnage de la trajectoire d’un point dans le plan (ou l’espace). Le geste effectif réalisé par l’utilisateur n’est toujours pas pris en compte. Par exemple, la machine ne distinguera pas si le geste a été effectué de la droite ou de la main gauche.
Pour accentuer la compréhension du geste par la machine, les dispositifs de pointage deviennent clairement insuffisants. Il s’agit alors d’utiliser des gants, ou un système de vision par caméra ; on parlera respectivement de dispositif intrusif, et non-intrusif : en effet, dans le cas des gants, on doit porter un périphérique, tandis qu’avec la caméra, on agit librement.
Une dernière classe d’interaction peut venir s’ajouter. Il s’agit des systèmes de prise en compte des gestes inconscients. En effet, une partie des gestes sont de nature inconsciente, et peuvent néanmoins contenir du sens. On parle alors de dispositifs de suivi du regard, et toujours de vision par caméra.
2.5 Les périphériques de sortie à retour haptique
2.5.1 Historique
La télé-robotique est le domaine technologique qui a nécessité la création de périphériques à retour de force. Le schéma classique est le couple Maître-esclave . Sheridan (Sheridan et al., 1992) a défini le système télé-opérateur Maître-esclave comme suit :
Un télé-opérateur Maître-esclave est constitué de 2 sous-parties :
- Le dispositif maître, généralement un dispositif mécanique plus ou moins anthropomorphique et autorisant de multiples degrés de liberté, actionné directement par l’opérateur humain ;
- Le dispositif esclave, isomorphique au maître, la plupart du temps équipé d’une main robotisé ou d’un outil spécialisé .
Le retour haptique (uniquement kinesthésique aux débuts ; on voit apparaître de plus en plus l’ajout du retour tactile) permet une immersion beaucoup plus efficace. L’opérateur a de plus en plus l’impression de manipuler directement l’outil que manipule le périphérique esclave distant.
Nous pouvons considérer que le premier périphérique à retour de force vient du monde de la télé-robotique : en 1952, Groetz et Thompson de l’Argonne National Laboratory (Goertz, 1952) créent l’Argonne (voir la figure 2.13), un système de télémanipulation maître-esclave permettant à un humain de diriger un bras robotisé dans un milieu hautement dangereux (centrale nucléaire, espace, fonds sous-marins).

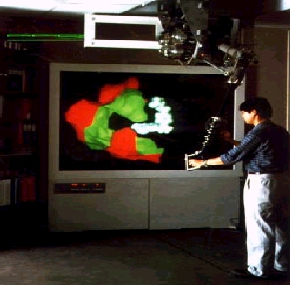
Par la suite, d’autres périphériques ont été conçus pour la télé-robotique, mais il ne s’agit ici que de simuler à distance une interaction physique qui a lieu dans le monde réel. En 1965, sous l’impulsion de Ivan Sutherland, Fred Brooks Jr. et ses collègues de l’université Chapel Hill de Caroline du Nord, se sont lancés dans le projet GROPE, visant à atteindre une simulation en temps réel pour la manipulation tridimensionnelle de molécules virtuelles, en ayant le retour des forces moléculaires. C’est plus de 20 ans plus tard que Brooks et ses collègues ont pu atteindre leur but initial (voir figure 2.14), grâce à la montée en puissance des ordinateurs (Brooks Jr et al., 1990).
Enfin, vers la fin des années 70, est apparu le premier prototype de périphérique effectuant le retour tactile d’une simulation graphique : le Sandpaper system développé au MIT (Minsky, 1995). Il s’agit d’un joystick offrant 2 degrés de liberté et rendant à la fois le retour de force et le retour tactile. Ainsi, il était possible de faire bouger un curseur au-dessus de divers échantillons de papiers virtuels et de sentir leurs textures. Cependant, par rapport aux périphériques de télé-robotique, on note une perte de liberté, puisque l’utilisateur doit garder une main sur le joystick. En retour, les dispositifs pouvaient embarquer des outils et mécaniques lourds, puisqu’ils sont posés sur leur support (en général, le bureau).
2.5.2 Les périphériques à retour haptique
Sans prétendre à l’exhaustivité, nous allons présenter quelques périphériques à retour haptique. Précisons tout d’abord la terminologie employée (tableau 2.2).
| Perception | Périphérique |
|---|---|
| Kinesthésique | à retour de force / d’effort |
| Tactile | à retour tactile |
Table 2.2 : Correspondance terminologique entre la perception et les périphériques
On peut noter une différence fondamentale entre les deux retours haptiques : le retour de force peut s’opposer à un mouvement volontaire de l’utilisateur, jusqu’à l’empêcher (s’il est suffisamment fort) ; le retour tactile ne le peut pas (Burdea et al., 1992).
2.5.2.1 Les périphériques à retour de force
Nous pouvons distinguer deux grandes familles de périphériques à retour de force (Casiez, 2004):
les périphériques à base non fixe (man based) : ce sont les périphériques portés par l’utilisateur, de type gant ou exosquelette.
les périphériques à base fixe (ground based ou desk based) : ils regroupent les périphériques de type bras, stylos (probe), manches ou souris
Nous allons maintenant voir les principaux dispositifs utilisés dans la recherche sur l’interaction haptique.
2.5.2.1.1 Les gants
Les gants doivent saisir les mouvements complexes de la main. Ils autorisent en général un grand nombre de degrés de liberté. En effet chaque doigt dispose de 4 degrés de liberté, auxquels il faut ajouter les mouvements de la paume et parfois du poignet. Le retour d’effort permet de ressentir la rigidité de l’objet mais ne permet pas de ressentir son poids.
Nous pouvons citer le Rutgers Master II qui est basé sur les travaux de (Burdea et al., 1992), et le CyberGrasp commercialisé par la société Immersion . Ces deux dispositifs se distinguent par l’emplacement de la structure mécanique. Ainsi, la structure est intérieure à la paume de la main pour le Rutgers Master II, ce qui empêche l’utilisateur de fermer totalement la main (figure 2.15).

2.5.2.1.2 Les bras maîtres
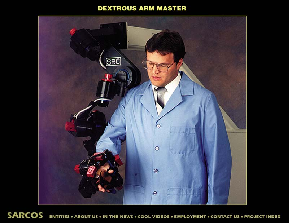
Les bras maîtres sont principalement utilisés dans les applications de télé-opérations. Sur la figure 2.16 apparaît le Dextrous Arm Master créé par SARCOS, l’une des entreprises pionnières dans le domaine. Ces systèmes, placés soit sur une table ou sur le sol, sont capables de fournir des forces puissantes à l’utilisateur. Ils sont également utilisés dans les applications de réalité virtuelle.
2.5.2.1.3 Les stylos à retour de force
Ce sont des périphériques proposant au minimum trois degrés de liberté en entrée (le déplacement du stylet dans l’espace), mais le plus souvent six ; et 3 degrés de liberté en sortie (c’est à dire sur le retour de force), et parfois six. La figure 2.17 illustre les différentes possibilités en terme de degrés de liberté.

Le périphérique le plus utilisé dans les laboratoires est le PHANTOM (figure 2.18), créé et commercialisé par Sensable Inc.

Son maniement s’effectue grâce un stylet situé à l’extrémité du périphérique ou en insérant le bout de son doigt dans un dé. Il est alors possible, grâce à une excellente résolution spatiale de ressentir les sensations que l’on aurait à toucher un mur lisse, un coin pointu, une sphère caoutchouteuse ou encore une surface texturée.
Nous pouvons citer le Virtuose 3D, le Delta Haptic et le Freedom 6S (figures 2.19, 2.20 et 2.21), également utilisés dans les laboratoires.



Précisons que les périphériques de type PHANTOM sont à la 3D ce que la souris à la 2D : des périphériques de pointage : seul un point est déplacé dans l’espace.
2.5.2.1.4 Les souris à retour de force
Les souris à retour de force sont des dispositifs à deux degrés de liberté. Nous pouvons citer la Wingman Force Feedback Mouse (figure 2.22), conçue par Immersion, et commercialisée par Logitech.
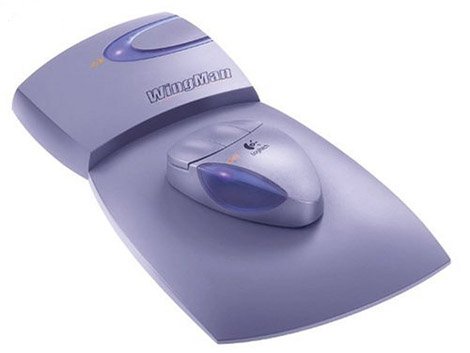
La souris proprement dite est solidaire de son socle. De fait, la surface de travail de cette souris est très réduite : 1,9 cm par 2,5 cm. Enfin, la souris peut générer des forces pouvant atteindre 1N.
La souris Wingman force Feedback a originalement été conçue pour les jeux vidéos, mais ses possibilités et son faible coût l’ont rendue populaire dans les recherches sur l’accessibilité auprès des personnes non-voyantes (Yu et al., 2001) (Gardner and Bulatov, 2001) (Tornil and Baptiste-Jessel, 2004)).
2.5.2.2 Les périphériques à retour tactile
Les dispositifs tactiles sont bien entendu basés sur les perceptions tactiles. Nous pouvons par exemple rappeler, que la perception tactile est le fait de trois classes de récepteurs : les thermorécepteurs, les nocirécepteurs et les mécanorécepteurs. Du côté de la machine, ce sont surtout des dispositifs répondant aux mécanorécepteurs, et donc à nos capacités de discrimination tactile, qui ont été conçus. On peut pourtant citer les travaux du Dr Suichi Ino, de l’université d’Hokkaido, qui cherche à créer un système de rendu de la température. Le Temperature Display, par exemple autorise un intervalle de température allant de 10°C à 60°C à une précision de 0.1°C pour un dispositif ne pesant que 30 grammes.
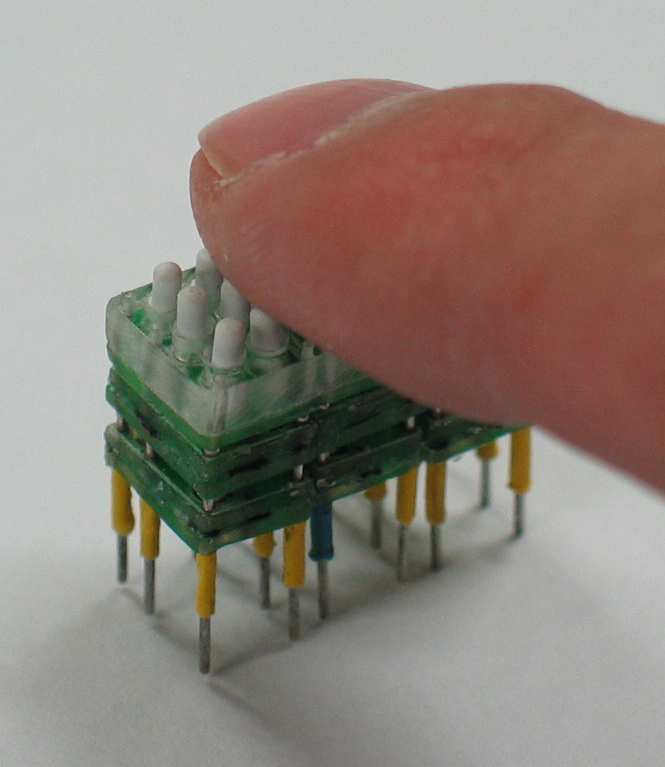
Pour le reste, donc, les dispositifs sont surtout axés sur la discrimination tactile. Et la principale approche pour rendre un élément tactile est celle visible sur la figure 2.23.On peut y voir une cellule d’affichage tactile. Cette cellule est composée de petits picots capables de monter ou descendre sur leur axe. Il ainsi possible de dessiner des petits motifs en relief.
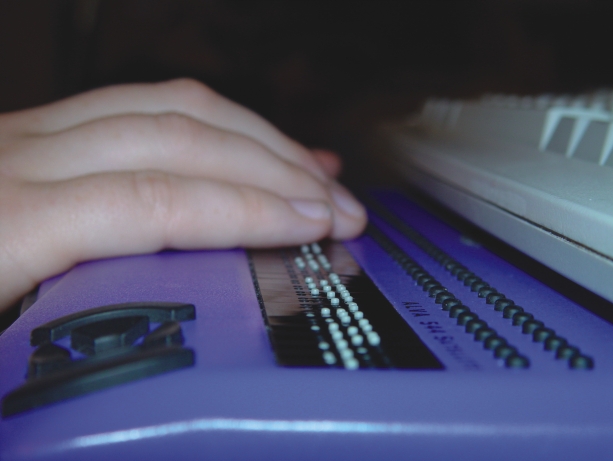
Les afficheurs brailles (figure 2.24) utilisent ces cellules. Comme un caractère braille est composé de 8 points (pour le braille informatique), une cellule est composée de 8 picots. Il s’agit ensuite d’accoler un certain nombre de cellules (selon les modèles, de 20 à plus de 80 cellules) pour afficher plusieurs caractères brailles, et donc, un mot, une phrase.
Toujours dans la même approche, les sociétés ABTIM4 et KGS5 ont équipé de cellules des surfaces plus grande. Il ont ainsi réalisé des systèmes capables de reproduire des dessins en relief (figure 2.25).
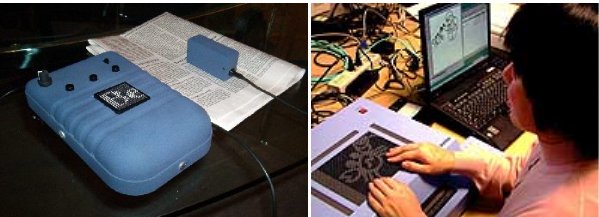
Pour terminer cette partie, nous pouvons évoquer une autre classe de périphériques, qui exploite les capacités tactiles en sortie (de l’ordinateur vers l’humain), et les capacités kinesthésiques en entrée (de l’humain vers la machine). Il s’agit souvent d’adapter une cellule braille sur un dispositif de pointage (Lecolinet and Mouret, 2005). D’autres exemples sont visibles sur la figure 2.26.

2.6 Les applications du retour haptique
2.6.1 La perception via une interface haptique
D’un point de vue général, il s’avère que les dispositifs actuels limiteront les procédures d’exploration haptique. L’utilisateur est en effet obligé d’adopter des stratégies afin d’extraire les propriétés des objets. Et ceci est particulièrement notable sur les dispositifs nécessitant la manipulation d’un activateur comme le manche du joystick ou le stylet du PHANTOM (Jansson and Billberger, 1999). De plus, la technologie même est un facteur limitant : (Wall, 2004) a ainsi montré que les moteurs du PHANTOM étaient inadéquats pour générer des textures très fines nécessitant des hautes fréquences.
En se référant aux procédures d’exploration haptique proposées par (Lederman et al., 1987), (Wall, 2004) a dressé le tableau 2.1, qui montre les possibilités et les impossibilités, lorsque l’on manipule un dispositif de pointage. Finalement, (Lederman and Klatzky, 2004) ont également montré que la rigidité du stylet limitait également la perception (par rapport à un stylet flexible).
| Mouvements d’exploration | Possibilité avec un dispositif de pointage |
| Le mouvement latéral (textures) | Possible, bien que les caractéristiques des textures varient |
| temporellement (vibration) et non pas spatialement | |
| La pression | Possible |
| Le contact statique | Possible, bien qu’il n’y ait pas de retour de température, |
| ou de forces distribuées pour générer des étirements | |
| Le maintient | Possible en attachant l’objet simulé à la place de l’activateur |
| L’enveloppement | Non possible en l’absence de plusieurs points de contact |
| Le suivi de contours | Possible, mais très difficile du fait d’une zone de contact |
| réduite à un point |
Pour l’anecdote, (Jansson, 2000) a suggéré qu’ obtenir une information par l’intermédiaire d’un affichage haptique tel que le PHANTOM, était semblable à obtenir de l’information d’un écran d’ordinateur en déplaçant sur celui-ci une feuille de papier percée d’un simple petit trou .
Concernant la mémorisation, (Jansson and Billberger, 1999) ont montré qu’une phase, même très courte, d’initiation à l’utilisation d’un dispositif comme le PHANTOM, permettait une nette amélioration des performances.
Comme nous allons maintenant le voir, les applications utilisant de tels dispositifs, malgré leurs défauts, se multiplient dans de nombreux domaines.
2.6.2 L’intégration du mode haptique dans l’interaction avec la machine
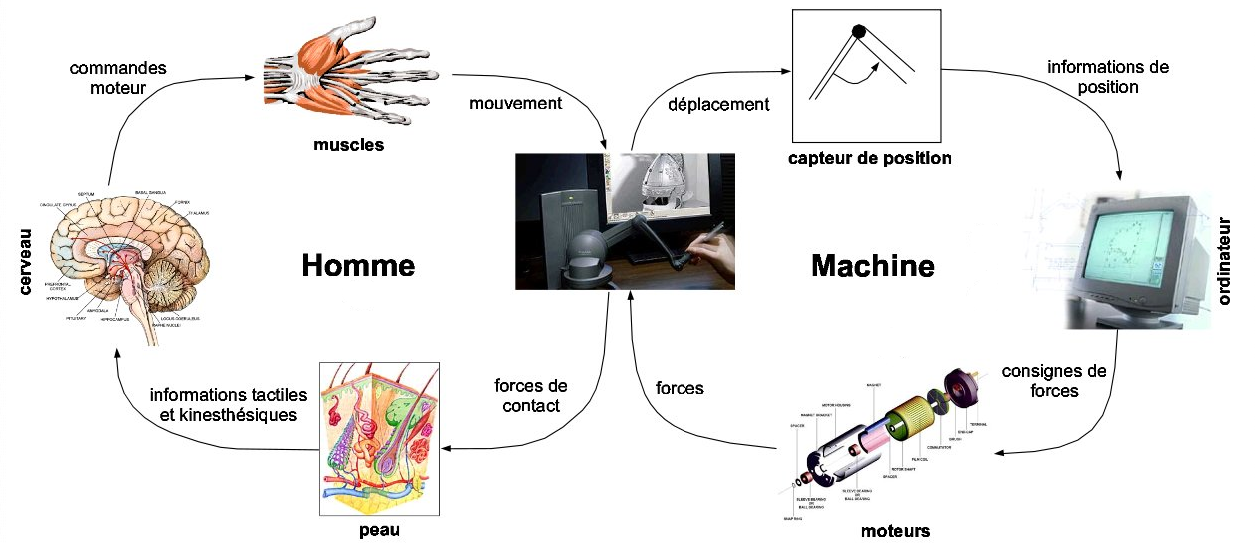
Le système haptique humain a un rôle important à jouer dans l’interaction homme-machine. A l’inverse des systèmes visuels et auditifs, le sens haptique est capable à la fois de percevoir et d’agir sur l’environnement et est une partie importante de la plupart des activités humaines. La figure 2.27 illustre la double boucle d’interaction liée au système haptique : l’homme et la machine agissent et perçoivent sur le mode haptique, en même temps. Les schémas de fonctionnement pour l’homme et pour la machine sont très similaires : il y a dans les deux cas une boucle action-réaction entre le monde extérieur, et le système de décision ; c’est à l’intersection des deux boucles que se situe l’interaction.
Dans cette partie, nous allons passer en revue quelques applications concrètes basées sur le mode haptique. On pourra revenir à cette page pour un historique sur les débuts du retour de force. On rappelle qu’initialement, c’est en télé-robotique que les dispositifs à retour de force sont apparus.
2.6.2.1 Le retour haptique comme technique d’interaction
(Miller and Zeleznik, 1999) ont identifié 4 utilisations possibles du retour haptique :
- Anticipation (Anticipation): force résistante annonçant l’imminence d’un événement.
- Indication (Suivi) : force donnant l’indication qu’une action est en cours.
- Follow-through (Accomplissement): force donnant l’indication à l’utilisateur qu’un événement s’est produit.
- Guidance (Guidage): guidage/contrainte du geste de l’utilisateur.
2.6.2.2 Le retour haptique : aspect logiciel
Afin de manipuler les dispositifs, les fabriquants ont mis à la disposition des programmeurs, des bibliothèques de programmation spécialisées.
Immersion Corporation™, le fabriquant de la souris Wingman Force Feedback Mouse™, propose ainsi l’Immersion Touchsense SDK. Cette bibliothèque permet de piloter tout un ensemble de périphériques (souris, joysticks, volants et manettes de jeux) chez de nombreux constructeurs (Microsoft™, Logitech™, Genius™, ThrustMaster™, Saitek™, Gravis™). De plus, une des particularités de ce SDK (Software Developpment Kit) est qu’il dispose d’un plugin pour les navigateurs Web. Ainsi, il est possible d’augmenter une page Web, avec des retours de force. Les navigateurs supportés sont Microsoft™Internet Explorer et Netscape™. Une version pour les navigateurs basés sur le moteur Gecko (Mozilla™, Firefox) existe, mais est encore en phase de développement.
Sensable™, le concepteur des PHANTOMs, propose plusieurs bibliothèques de programmation : Le Ghost SDK, et les HDAPI et HLAPI. Le Ghost SDK est basé sur un moteur de rendu du toucher, à partir d’une scène 3D. Par exemple, il dispose d’un lecteur de fichiers VRML (Virtual Reality Markup Language : langage de description de scènes 3D), et l’on peut très rapidement toucher les objets de la scène, avec un PHANTOM. Cependant, il peut être intéressant de se passer d’une base tridimensionnelle pour générer des effets. Ainsi, Sensable™a proposé les bibliothèques HDAPI et HLAPI (pour Haptic Device API et Haptic Library API). La bibliothèque HDAPI permet un contrôle direct des paramètres de fonctionnement du périphérique : les positions, orientations et vitesses des différents éléments du dispositif, l’accès aux systèmes de coordonnées internes des moteurs, les températures des moteurs… Comparé au Ghost SDK, le HDAPI autorise beaucoup plus de liberté et de précision lors de la création des effets. Il peut cependant s’avérer fastidieux de créer des effets à partir d’autant de paramètres. C’est pour cette raison que Sensable™a conçu le HLAPI. Il s’agit d’un bibliothèque intermédiaire entre les deux autres. À l’instar du GHOST SDK, on part d’une scène 3D, mais cette fois, la scène est décrite en OpenGL. Ceci permet un contrôle encore très précis.
Nous pouvons également citer le H3D API de SenseGraphics6. C’est une bibliothèque de programmation haptique open-source (licence GPL dans un cadre de recherche), basée sur le format de fichier X3D (il s’agit du format de description de formes 3D, basé sur XML ; c’est le successeur du VRML). Pour le moment, cette bibliothèque ne supporte que les PHANTOMs.
2.6.2.3 Le retour haptique : à quoi cela ressemble ?
Jusqu’ici, nous avons discuté de périphériques à retour de force, mais nous n’avons pas dit en quoi consistait le retour de force. La partie précédente a présenté quelques bibliothèques de programmation qui permettent de concevoir des effets de retour de force, effets dont nous allons maintenant présenter les grandes familles (en notant bien, que les bibliothèques de programmation permettent de combiner ces différents effets).
Le contact ponctuel : il s’agit de l’effet le plus classique, mais aussi le plus étudié. L’idée est de générer une force dans un dispositif à retour de force, pendant qu’on le manipule, de manière à simuler le contact avec un objet du monde virtuel, comme s’il existait. Par exemple, avec un périphérique type PHANTOM, imaginons que la manipulation du stylet amène le curseur au contact d’une forme virtuelle ; à cet instant, les moteurs du PHANTOM se durcissent afin de limiter les mouvements de l’utilisateur selon certaines directions. On aura alors l’illusion de rentrer en contact avec un objet physique.
Le cloisonnement : Il s’agit de définir une zone (souvent rectangulaire ou elliptique), qui aura une frontière entièrement paramétrable. Cet effet possède alors une notion d’intérieur et d’extérieur. On peut par exemple donner la possibilité ou non, au pointeur de rentrer ou de sortir de la zone. Il peut s’agir également de définir une zone d’attraction, qui attirera le curseur en son centre lorsqu’il passe à une certaine distance.
Les effets dynamiques : Ce sont des effets dont les paramètres évoluent dynamiquement selon les propriétés du geste de l’utilisateur. Par exemple, une certaine friction peut être simulée, en fonction de la vitesse instantanée, ou du rayon de courbure. Autre exemple, le périphérique peut empêcher l’utilisateur des changements de direction trop brusques : on simule ainsi l’inertie du déplacement d’un objet lourd.
Les effets de texture : Ces effets permettent de simuler des textures. Celles-ci peuvent être synthétisées grâce à un certain nombre de paramètres (fréquence, amplitude, directions…), ou bien simulée depuis une image réelle de façon similaire à ce que réalise une bump-map en image de synthèse, c’est à dire une image ou l’intensité d’une nuance (du noir au blanc par exemple) code l’altitude ou la profondeur.
2.6.3 Quelques applications du retour haptique
2.6.3.1 La médecine et la rééducation
Depuis le début des années 90, la médecine est devenue un champ d’application du retour haptique. Plusieurs pratiques peuvent nécessiter l’utilisation de dispositifs à retour de force.
La palpation des tissus : Elle correspond à la première étape d’une consultation : le diagnostic. Et la forme la plus traditionnelle de diagnostic est la palpation des organes et des tissus du patient. En 1994, (Langrana et al., 1994) ont pour la première fois utilisé un périphérique à retour haptique, le Rutger Master, pour palper un genou virtuel. Depuis, les outils ont évolués, et les applications de télé-diagnostic se généralisent.
La télé-chirurgie : La télé-chirurgie est un des grands axes de la recherche sur les périphériques haptiques. Le praticien peut ainsi intervenir au cours d’une opération alors qu’il ne se trouve pas sur place.
La rééducation : Cette approche de l’utilisation des dispositifs à retour de force est très intéressante. En général, les dispositifs de rééducation utilisent des périphériques sortis de leurs contextes habituels d’utilisation. (Reinkensmeyer et al., 2000) ont par exemple utilisé un joystick à retour de force tel qu’on peut en trouver dans le commerce, pour rééduquer l’acuité motrice d’un patient ayant subit un accident cérébral.
2.6.3.2 La modélisation d’objets virtuels
Un logiciel de modélisation tridimensionnelle nommé FreeForm7, a été présenté par Sensable Technologies Inc. Ce système se base sur une métaphore du sculpteur : l’utilisateur se sert du PHANTOM pour sculpter une pierre virtuelle présentée à l’écran, et rendue par un retour de force.
De manière similaire, InTouch (Gregory et al., 2000) est un logiciel de modélisation 3D. Il permet également le dessin sur un volume (figure 2.28).
2.6.3.3 Le travail collaboratif
L’utilisation du mode haptique dans une collaboration en environnement virtuel, peut permettre une amélioration, notamment de la conscience que l’on doit avoir de travailler avec quelqu’un (Basdogan et al., 2000).
(Sallnäs and Zhai, 2003) ont montré également une diminution du taux d’erreur lors d’une tâche de pointage collaboratif lorsqu’un retour haptique était rendu (pour des temps identiques avec ou sans retour haptique).
On peut noter qu’il s’agit d’une classe d’application qui nécessite des recherches pluridisciplinaires : rendus haptiques, bien sûr, mais aussi réseaux et traitement du signal. Par exemple, lorsque la collaboration se fait via un réseau, il faut anticiper, afin d’atténuer le délai temporel qu’il peut y avoir entre les deux machines. (Belghit, 2003) a ainsi utilisé une forme modifiée du LPC (Linear Prediction Coding) pour améliorer l’ergonomie du télégeste.
2.6.3.4 L’entraînement
Un des intérêts du retour haptique est qu’il peut simuler l’utilisation d’outils du monde réel. C’est donc tout naturellement que des simulateurs, ou des plate-formes d’entraînement, ont pu être conçues.
(Williams et al., 2004) ont par exemple mis au point un système d’entraînement au diagnostic du mal de dos. Leurs recherches les ont amené à créer un moyen de playback haptique. Le playback haptique consiste à enregistrer les mouvements réalisés par une personnes, puis de les refaire exécuter par le dispositif haptique (dans ce cas, il s’agit du PHANTOM). De cette manière, les étudiants pouvaient suivre les mouvements d’un expert, avant de réaliser leur propre exercice. On peut quasiment parler de retour de geste, de la part de la machine.
Le centre lavalois de ressources technologiques8 a proposé le système VTT (Virtual Technical Trainer) qui est un simulateur de machine outils. Ce simulateur a comme raison d’être l’actuelle utilisation quasi systématique de machines à commandes numériques. Or ces dernières ont pour particularité d’introduire une distance à la matière telle que l’apprenant perd toute notion des contraintes mécaniques dans les tâches réalisées par les machines d’usinage.
2.6.3.5 Le domaine artistique
Le retour de force a souvent été utilisé dans les domaines artistiques. Comme dans la partie précédente, cela peut consister en la simulation d’un instrument réel, comme pour le projet dAb (figure 2.29) : le dispositif utilisé est un PHANTOM, et il s’agit d’imiter les sensations que l’on a lors du maniement de pinceaux.
Dans une approche très différente, le projet PHASE (Plate-forme Haptique d’Application Sonore pour l’Eveil Musical (figure 2.30) propose un moyen de création complètement nouveau. Le retour haptique est utilisé pour faire sentir les éléments d’un monde virtuel que l’on rencontre pendant l’exploration de celui-ci.


2.7 Conclusion
Dans ce chapitre, nous avons parcouru quelques aspects de l’interaction homme-machine, en orientant notre discours vers le potentiel, les utilisations et les défauts, des interactions basées sur le mode haptique. Une dernière utilisation reste cependant à détailler : il s’agit de l’aide aux personnes non-voyantes, mais tout ceci sera étudié et défini dans le chapitre 4.
Pour le moment, nous avons vu que le retour haptique était une possibilité d’amélioration de l’immersion dans un monde virtuel, un outil d’entraînement, ou encore un nouveau moyen d’expression artistique.
Nous allons maintenant nous rappeler qu’à l’origine, le retour de force a été utilisé dans le but d’améliorer les performances motrices humaines dans les environnements virtuels et télé-robotiques (Rosenberg, 1993) (Sheridan et al., 1992). Aussi, nous allons étudier cet aspect sur un simple bureau virtuel, dans un schéma d’interaction WIMP, où l’action gestuelle principale, est le geste de pointage. En effet, sur les systèmes informatiques courant (Windows, Mac OS, Linux), la l’interaction est basée sur les mouvements de la souris et les cibles à cliquer (boutons, menus, fenêtres). Aussi, un des axes de recherches phare dans le domaine de l’IHM, consiste à essayer d’améliorer les gestes de pointages, c’est à dire, réduire le temps d’acquisition d’une cible à l’aide d’un dispositif de pointage.
Comment lire ce graphique ?
L’axe horizontal indique l’indice de difficulté de la tâche. Comme il s’agit de la loi d’Accot, l’indice de difficulté est relatif ici à la largeur de la trajectoire à suivre, et à sa rectilinéarité (est-elle très courbée ou non).
L’axe vertical indique le temps du mouvement (en ms).
Donc, plus le segment de droite est bas sur ce graphique, plus le dispositif correspondant est efficace dans une tâche de suivi de trajectoire.
La souris apparaît comme un des périphériques les plus performants, avec la tablette graphique. Ensuite, le trackpoint (le petit joystick disponible sur certains portables pour manipuler le pointeur), le touchpad (le petit écran tactile des ordinateurs portables) et le trackball, sont beaucoup moins performants.
Une autre étude (MacKenzie et al., 2001) confirme ce résultat (figure 2.9).