Chapitre 1 Le système haptique de l’homme
1.1 Introduction
1.1.1 Nos sens et la perception du monde
Avant d’aborder plus spécifiquement le sujet qui nous intéresse, nous allons passer en revue quelques classifications des systèmes de la perception humaine.
Il est d’usage de parler des cinq sens : la vue, l’ouïe, l’odorat, le goût et le toucher. Cette classification constitue une première approche de la perception du monde qui nous entoure ; comme nous allons le voir, la perception est bien plus complexe.
Pour commencer, j’ai choisi de citer le résultat d’une étude en psychologie (Turbiaux, 1996) qui a abordé le problème de la perception des informations. Selon cette étude, ces dernières sont perçues par un sujet voyant à:
- 83 % par la vision ;
- 11% par l’audition ;
- 3,5% par l’odorat ;
- 1,5% par le toucher ;
- et 1% par le goût.
Pour autant, il faut rester prudent avec une telle approche. En effet, la perception peut être segmentée en cinq sens. Pourtant, le tableau 1.1 présente une classification des sensations. Il s’agit de la classification de Sherrington (1857-1952).
| les extérocepteurs : nous renseignent sur le monde extérieur | télérécepteurs : perception à distance | récepteurs visuels |
| récepteurs auditifs | ||
| récepteurs olfactifs | ||
| récepteurs de contact | récepteurs gustatifs | |
| récepteurs cutanés du toucher | ||
| les intérocepteurs : nous renseignent sur notre propre organisme | viscérocepteurs : disséminés dans les viscères | nous renseignent sur un paramètre physiologique interne (la douleur par exemple) |
| propriocepteurs : regroupés (oreille interne) ou disséminés (fuseaux neuro-musculaires) | nous renseignent sur un paramètre lié au travail de relation : l’état de tension des muscles, sur la position relative des différentes parties du corps, et sur la position du corps dans l’espace |
Étudions plus précisément tout ce vocabulaire…
La sensibilité intéroceptive :
Elle comprend toutes les sensations qui viennent de l’estomac, de l’intestin. S’y ajoutent les sensations viscérales, ainsi que cette sensibilité générale du corps qu’on appelle la coenesthésie (sensations d’aise ou de malaise).
La sensibilité proprioceptive :
Celle qui nous renseigne sur les positions, attitudes, mouvements de notre corps et de nos membres. Cette sensibilité comprend :
- le sens kinésique ou kinesthésique : il nous renseigne sur nos mouvements proprement dits (déplacements de nos membres et de notre corps dans l’espace) ;
- le sens statique ou vestibulaire : sens qui a son organe dans l’oreille interne et qui nous donne le sens de la verticalité, des mouvements de rotation et de translation ; il préside à l’équilibration générale du corps.
La sensibilité extéroceptive :
Elle nous informe sur les objets extérieurs. Les psychologues distinguaient les sens impressionnables par contact direct et les sens qui sont impressionnables à distance.
- Les sens impressionnables par contact direct :
- Les sensibilités cutanées : le toucher qui
suppose un contact direct avec l’objet à percevoir
- le tact,
- les sensations thermiques,
- la douleur.
- Les sens chimiques : le goût et l’odorat liés aux fonctions de nutrition.
- Les sensibilités cutanées : le toucher qui
suppose un contact direct avec l’objet à percevoir
- Les sens impressionnables à distance : Ces sens sont plus indépendants du milieu extérieur que ceux qui exigent le contact direct. L’ouïe et la vue apportent à l’être vivant des messages lointains qui lui permettent une adaptation anticipée de son comportement.
Pour (Berthoz, 1997), « la perception n’est pas seulement une interprétation des messages sensoriels. Elle est également contrainte par l’action, simulation interne de l’action, jugement et prise de décision et anticipation des conséquences de l’action : il y a filtrage des informations données par les sens en fonction de ses projets propres. Un très grand nombre de mouvements exigent une anticipation ou une extrapolation fondée sur une estimation utilisant les expériences antérieures (rôle de la mémoire). »
Tout ceci nous donne une vision peu évidente de la perception. Et il n’est pas question ici d’aborder le côté philosophique de la question.
« Percevoir, c’est se rendre quelque chose de présent à l’aide du corps »
Merleau-Ponty
Pour finir cette partie d’introduction, précisons que toutes les connaissances qui se rapportent au corps, évoluent en fonction des avancées de la compréhension des mécanismes mis en œuvre.
Nous allons tenter, dans ce qui suit, de définir la terminologie utilisée lorsqu’il est question d’interaction haptique.
1.1.2 Première approche du système haptique
Our knowledge of touch consists of only fragmentary concepts and findings, some dealing with basic functional properties (e.g., cutaneous sensitivity, limits of kinaesthetic space perception) and others with capabilities of the systems as a whole (e.g., the identification of three-dimensional objects)
(Loomis and Lederman, 1986), cité par (Colwell, 2001)
Tout d’abord, un petit peu d’étymologie. Le mot haptique vient du grec haptestai signifiant « toucher », et est originalement synonyme au sens tactile.
D’après (Appelle, 2013), ce serait le psychologue (Révész, 1950) qui aurait le premier utilisé le terme haptique pour désigner le système tactilo-kinesthésique de la main, c’est à dire la synthèse
- des perceptions des systèmes sensoriels de la main
- et des mouvements d’exploration de la main.
Plus tard, pour (Loomis and Lederman, 1986), la perception haptique était celle qui impliquait les sens cutanés et kinesthésiques pour transmettre l’information sur un objet ou sur un évènement. Ils n’ont cependant pas restreint cette définition à la main. La sensation de la texture de la nourriture dans la bouche apparaît donc comme une partie de la perception haptique, au sens de Loomis et Lerdeman.
Une autre définition est celle de (Gibson and Carmichael, 1966) (toujours cité par (Appelle, 2013). Pour lui, la pression, la force, la stimulation de la peau, l’activité des muscles, des articulations et des tendons étaient mises en œuvre lors de la manipulation d’objets. Pour Gibson, le système haptique inclue plusieurs sous-systèmes :
- Le toucher cutané: une stimulation de la peau sans mouvements des muscles ou des articulations.
- Le toucher haptique : une stimulation de la peau avec des mouvements des articulations.
- Le toucher dynamique : une stimulation de la peau avec des mouvements des articulations et des muscles.
- Le toucher orienté: une stimulation de la peau avec une stimulation vestibulaire2.
(Appelle, 2013) a très justement noté que la prolifération des termes et des définitions liés à la perception haptique, indique que la compréhension dans ce domaine n’en est toujours qu’à ces débuts. Il est également fréquent de trouver des définitions contradictoires entre plusieurs recueils.
Dans ce chapitre et dans la suite de cette thèse, nous retiendrons la définition actuellement admise, à savoir :
le terme haptique se réfère à la combinaison :
1.2 Le système haptique côté perception : la somesthésie
La somesthésie est liée à l’ensemble des sensibilités cutanées et internes. Elle est composé par :
- le sens tactile: il est relayé par les récepteurs sensoriels situés sous l’épiderme, et dont on relève la plus grande densité dans la main. Ces récepteurs relaient « le contact initial avec l’environnement », et permettent d’en appréhender la géométrie détaillée de la surface, la rugosité, la température (toujours de surface).
- le sens kinesthésique: du grec kinêsin signifiant « se mouvoir » et aisthêsis signifiant sensation , il se réfère à la kinesthésie, la sensation interne du mouvement des parties du corps assurée par le sens musculaire (sensibilité profonde des muscles) et par les excitations de l’oreille interne [Le Petit Robert]. Ce sens permet de connaître l’effort que font nos muscles par exemple lorsque nous soulevons (poids) ou lorsque nous poussons (résistance) un objet.
1.2.1 La perception tactile
Les récepteurs physiologiques de la perception tactile se trouvent dans la peau 1.1. La bande passante du sens tactile (c’est à dire la fréquence à laquelle les stimuli tactiles sont perçus) et de 0 à 400 Hz (Shimoga, 1992). Elle peut cependant monter à des très hautes fréquences situées entre 5000 à 10000 Hz dans le cas de la reconnaissance de textures à très petits détails.
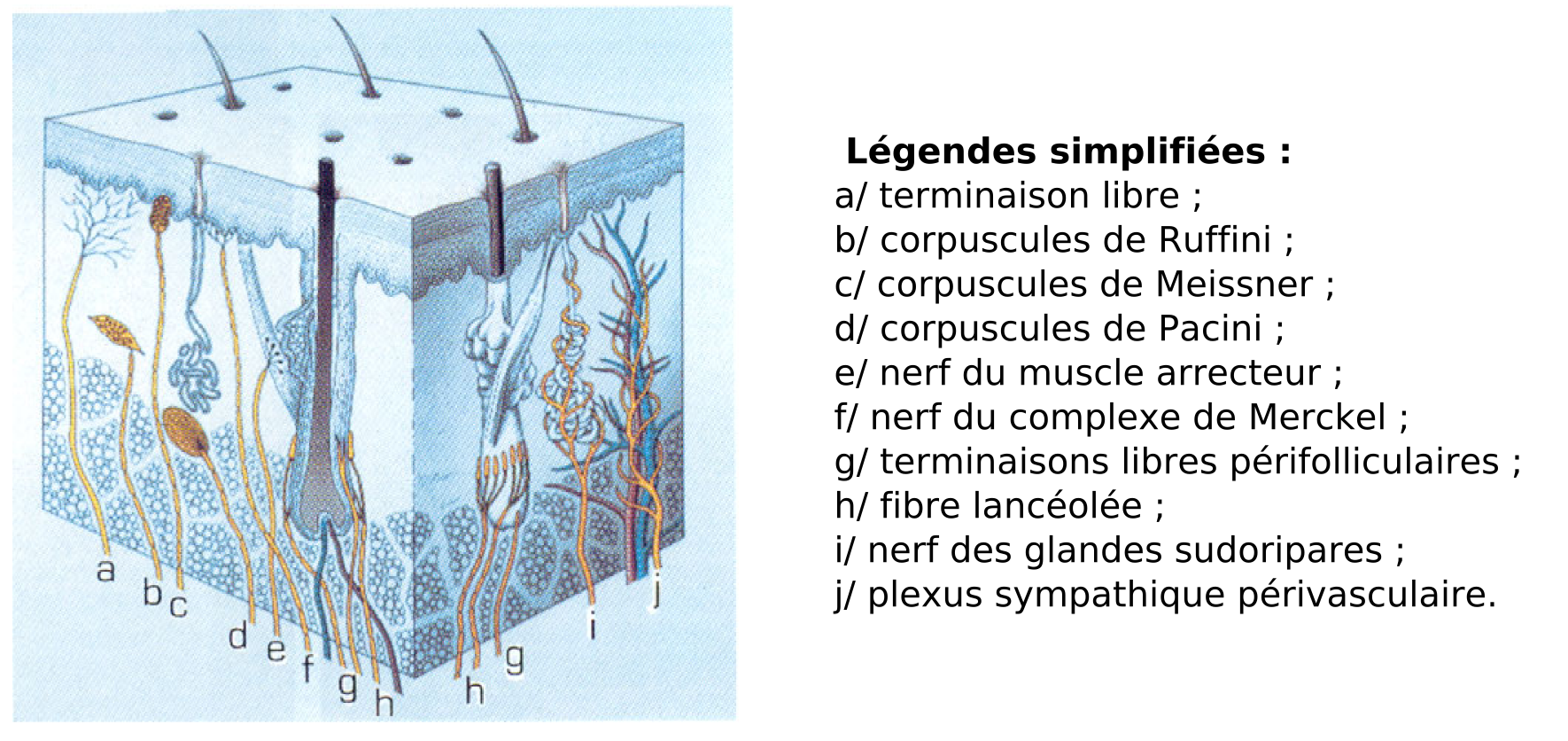
Nous pouvons distinguer 3 natures de récepteurs tactiles :
- les thermorécepteurs : liés aux sensations de chaud et de froid ;
- les nocirécepteurs : liés à la sensation de douleur ;
- les mécanorécepteurs : liés à la discrimination tactile.
On distingue 4 types de mécanorécepteurs (Cholewiak and Collins, 2013), (Kalawsky, 1993), (Seow, 1988) ; Il sont présentés dans le tableau 1.2.
| Type de récepteur | Taux d’adaptation | Fréquences des stimuli | Zone réceptrice | Fonction | Sensibilité à la température |
|---|---|---|---|---|---|
| Disques de Merckel | Lent | 0-10 Hz | Petite, bien définie | Pression localisée | oui |
| Corpuscules de Ruffini | Lent | 0-10 Hz | Grande, indéfinie | Pression, étirement de la peau | oui, si >100Hz |
| Corpuscules de Meissner | Rapide | 20-50 Hz | Petite, bien définie | Tact, vitesse | non |
| Corpuscules de Pacini | Rapide | 100-300 Hz | Grande, indéfinie | Vibration, accélération | oui |
Tous ces récepteurs sont donc situés dans la peau, mais dans des concentrations différentes selon les endroits du corps.
On désigne par homoncule ou homonculus la représentation de notre propre corps à l’intérieur de notre cerveau. Mais comme les différentes parties de notre corps n’ont pas toutes la même importance pour notre cerveau, certaines prennent beaucoup de place et d’autres très peu. Par exemple, nos mains qui sont très utiles et capables de manipuler de très petits objets prennent beaucoup plus de place que nos jambes.
La perception sensitive donnée au niveau de la peau peut être ainsi représentée grâce à un homonculus (figures 1.2 et 1.3).
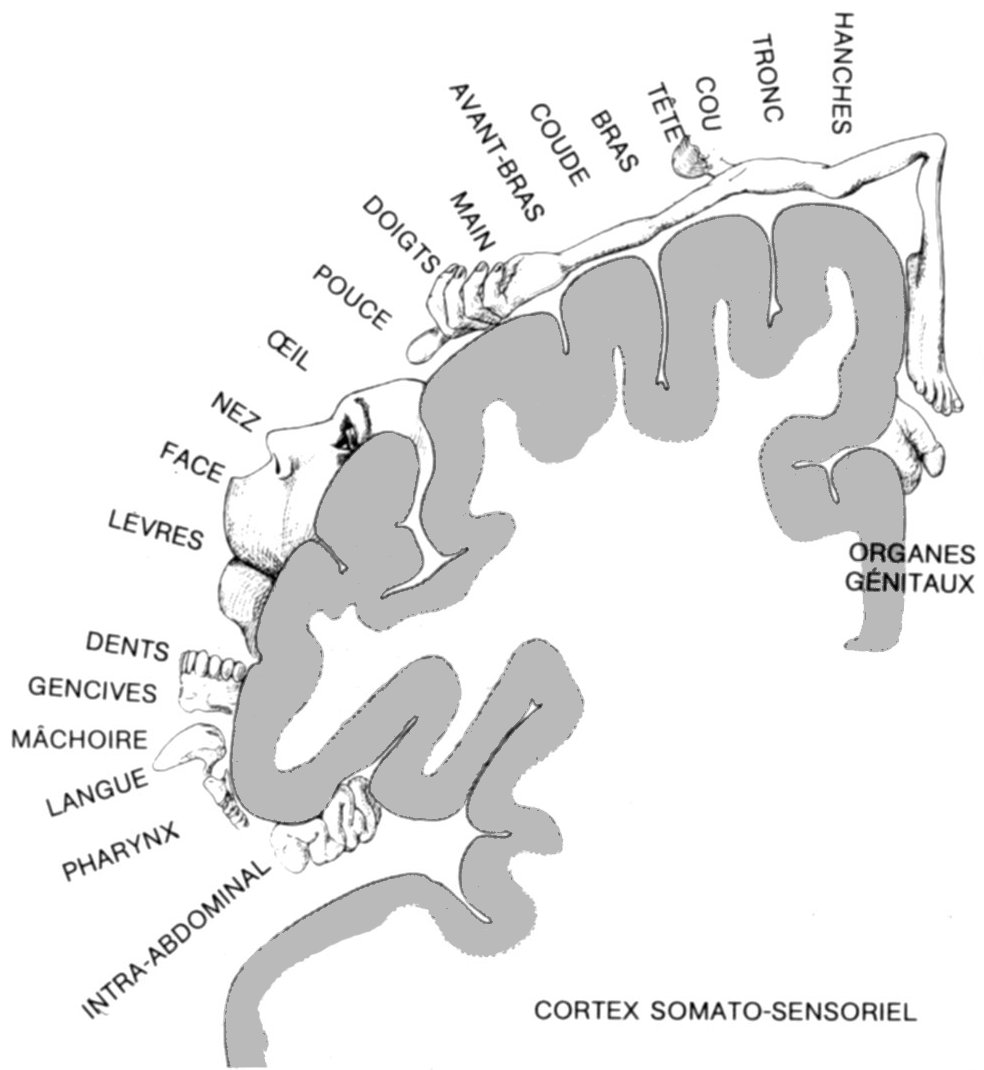

Historiquement, c’est grâce au compas de Weber, formé de deux pointes sèches, qu’en 1835 il a été possible de déterminer l’acuité tactile individuelle comme étant la plus petite distance entre deux contacts simultanés perçus comme distincts. Les premiers homonculi ont été tracés à cette époque. Des études plus récentes ont montré des seuils de précision sur le sens tactile :
- Discrimination entre deux points de contact avec la peau : de 1 à 2,5mm.
- Seuil de détection d’une force : 63mg
- Seuil de perception d’un déplacement statique : 11,2 µm
1.2.2 La perception kinesthésique
Le sens kinesthésique intègre les informations sur les positions, les mouvements et les forces appliqués sur ou par le corps. Il est relayé par des récepteurs situés dans les tendons musculaires au niveau des articulations, ainsi que dans l’oreille interne. La bande passante de ces récepteurs est plus basse que ceux de la perception tactile soit de 20 à 30 Hz. Enfin, il s’appuie sur une utilisation de l’effet de mémoire des gestes.
La perception kinesthésique est composé par :
- Le sens proprioceptif: relatif aux stimuli se produisant dans l’organisme. Il fournit l’information liée à la position du corps, et est basé sur les récepteurs situés dans les tendons entres les muscles et les os, dans l’oreille interne, et sur les impulsions du système nerveux par effet de mémoire. C’est précisément ce sens qui nous donne la capacité de connaître la configuration de notre corps dans l’espace sans avoir à le regarder.
- le sens extéroceptif: relatif aux stimuli issus de phénomènes extérieurs aux corps humain. Par exemple, appréhender le poids, la forme ou la raideur d’un objet que l’on est en train de manipuler.
Remarques :
- on trouve parfois dans la littérature la perception tactilo-proprio-kinesthésique pour désigner la perception haptique.
- Nous considérerons par la suite, comme souvent dans la littérature, que le sens kinesthésique englobe le sens proprioceptif. En effet, d’après le Larousse, la proprioception se dit de la sensibilité du système nerveux aux informations sur les postures et les mouvements, venant des muscles et des articulations . Les trois domaines liés à la proprioception sont les sensibilités à la position dans l’espace, au mouvement du corps et aux forces exercées sur les muscles. Les deux premiers domaines correspondent au sens kinesthésique (Fuchs, 2006).
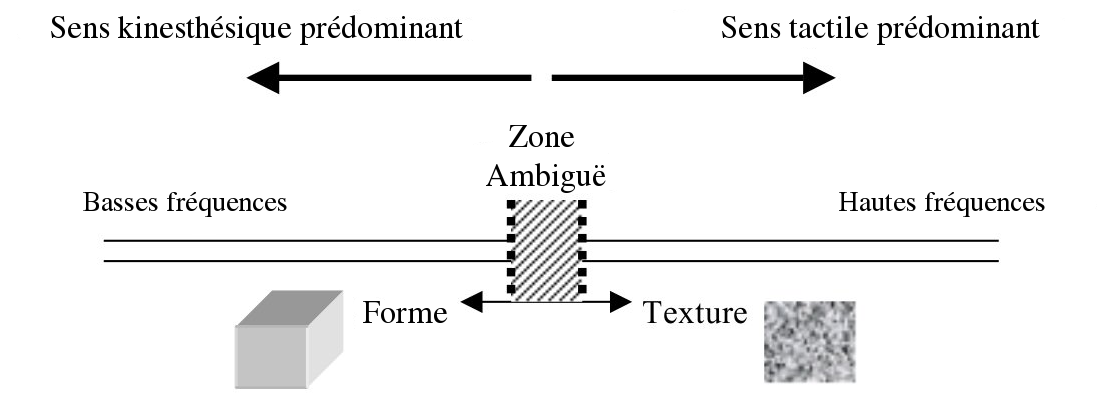
1.2.3 En résumé
La perception des signaux spatiaux dépend de la fréquence du signal. La distinction entre “forme” et “texture” est liée aux caractéristiques des sens kinesthésiques et tactiles. La figure 1.4 illustre la notion de perception haptique, en terme de fréquence des stimuli.
1.3 Le système haptique côté action : le système moteur
Nous allons maintenant présenter l’autre côté du système haptique tel que nous le considérons. La partie @(somesthesie) concernait le sous-système perceptif. Ici, c’est donc le sous-système moteur qui va nous intéresser.
Et pour tenter de garder une cohérence lors de la présentation d’un système très complexe, nous allons découper le discours en plusieurs parties, depuis les définitions psychophysiques de bas-niveau, en remontant les abstractions, vers les définitions de l’aboutissement de l’exécution du système moteur : le mouvement, puis le geste.
1.3.1 Un petit peu de psychophysique
Petit rappel de la définition du système haptique : il s’agit de la combinaison
- du système perceptif lié au toucher et à la kinesthésie (vu en 1.2),
- et des mouvements d’exploration.
Cette combinaison confère au système haptique une propriété unique : un même système nous permet de connaître notre environnement (sous-système perceptif de la kinesthésie et du toucher), et d’agir sur lui (les mouvements d’exploration).
L’objet de cette partie est de donner quelques notions sur le sens du mouvement, lui-même lié au système moteur.
Le système moteur permet de contrôler la position du corps ainsi que les forces à mettre en jeu lors de l’interaction avec le monde extérieur.
Pour le définir un peu plus précisément, les bandes passantes relatives au système moteur vont suivre. La bande passante d’un système est la vitesse à laquelle nous répondons aux stimuli par une action. Elle s’exprime en Hertz (Hz), car nous parlons ici de fréquence ; pour obtenir le temps de réaction, il faut prendre l’inverse.
Pour le système moteur, la bande passante oscille selon les situations entre 1 et 10 Hz (Casiez, 2004):
- réponse à des signaux déstabilisant : entre 1 et 2 Hz (0,5 à 1s)
- réponse à des signaux périodiques : entre 2 et 5 Hz (0,2 à 0,5s)
- réponse à des trajectoires apprises : 5 Hz (0,2s)
- réponse de type réflexe : 10 Hz (0,1s)
Pour donner un ordre d’idée sur l’intensité des forces mises en œuvre, elles sont de l’ordre de 44N au niveau des articulations des doigts et de 102N au niveau de l’épaule pour un homme.
De manière similaire à ce que l’on a pour la perception tactile, il a été possible de tracer un homonculus sur le système moteur humain (figure 1.5).
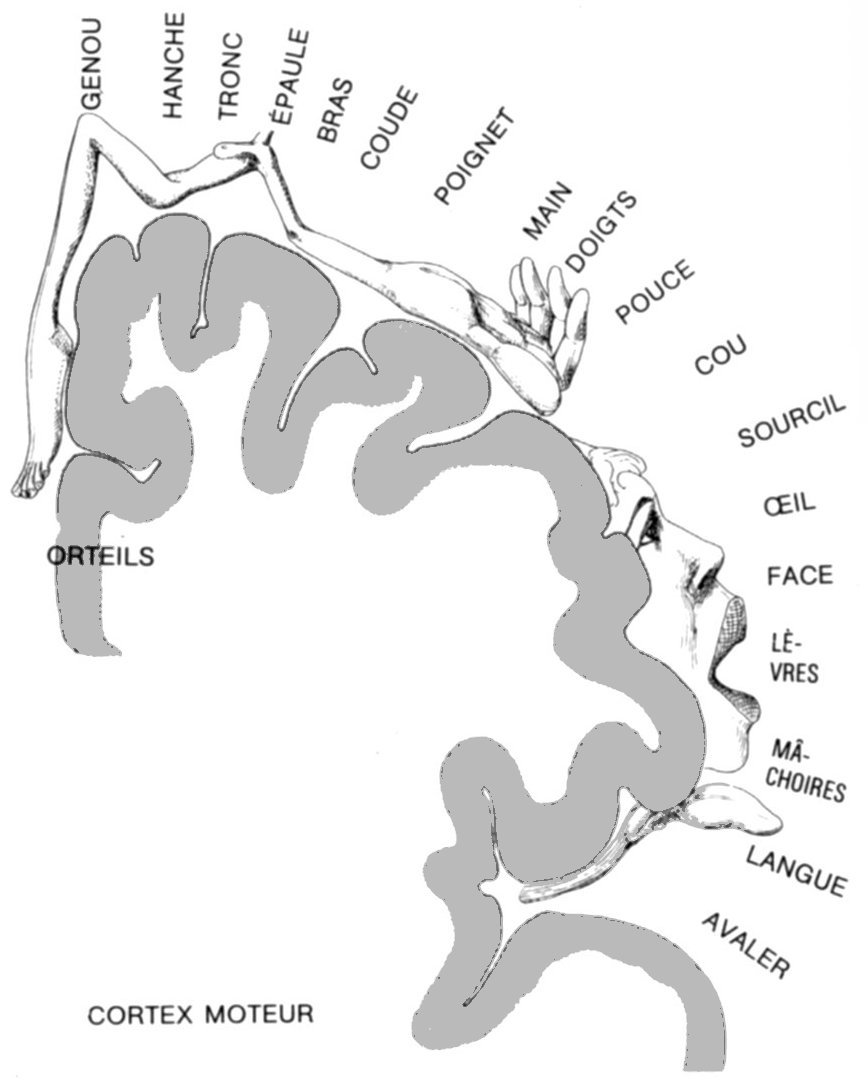
Toujours de manière parallèle à ce que l’on a observé pour la perception tactile, il faudra tenir compte des capacités physiologiques du système moteur lors de la conception de méthodes d’interaction haptique, et lors du choix et de la position d’utilisation des périphériques.
Notre discours va à présent s’élever d’un cran, en terme d’abstraction du système moteur : après la psychophysique, nous abordons le concept de mouvement, au travers de ses modélisations mathématiques.
1.3.2 Les lois mathématiques liées au mouvement
La conséquence extérieure de la mise en action du système moteur, c’est le mouvement. Il n’est pas question ici de traiter en profondeur du mouvement, car il faudrait une thèse entière.
Nous survolons ici quelques lois mathématiques qui tendent à modéliser le mouvement. La loi de Fitts donne ainsi le temps nécessaire pour un geste de pointage ; la loi d’Accot précise le temps lorsque la tâche est plus spécifiquement un suivi de trajectoires ; la loi de puissance 2/3 et la loi de jerk minimal tendent à modéliser les trajectoires des gestes. Enfin, le modèle d’impulsion initiale modélise plus spécifiquement le geste de pointage.
1.3.2.1 La loi de Fitts
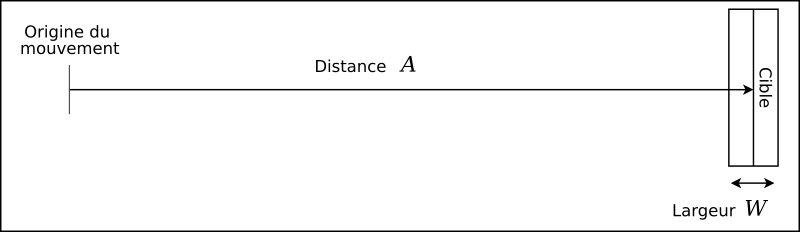
En 1954, Fitts a empiriquement développé un prédicteur quantitatif donnant le temps nécessaire pour effectuer une tâche de type “ acquisition et pointage d’une cible” (Fitts, 1954). Il a présenté le rapport suivant, connu sous le nom de loi de Fitts.
Le temps du mouvement \(MT\) requis pour sélectionner une cible de taille \(W\) situé à une distance \(A\) est :
\[\begin{equation} MT=a+b\log_{2}(2A/W) \tag{1.1} \end{equation}\]
où \(a\) et \(b\) sont des constantes déterminées empiriquement. Le logarithme \(\log_{2}(2A/W)\) représente l’indice de difficulté (\(ID\)) de la tâche et est exprimé en bits (sa base est 2). Plus élevée est la valeur de \(ID\) et plus difficile est la tâche. Si \(MT\) est exprimé en seconde, la constante \(a\) sera exprimée en seconde et \(b\) en seconde/bit. L’inverse de \(b\) (soit \(1/b\)) est l’indice de performance (\(IP\)) et est exprimé en bit/seconde.
La figure 1.6 illustre l’expérience qui a permis à Fitts d’établir sa loi. La tâche que devaient accomplir les sujets était la suivante. Initialement, la main est placée à l’origine du mouvement ; alors, le sujet doit aller le plus vite possible toucher une cible distante de \(A\)cm et large de \(W\)cm.
La formulation originale de la loi de Fitts (1.1) s’avère cependant inexacte pour les faibles valeur de l’\(ID\) (< 3bits), montrant une courbure de \(MT\) au dessus de la droite de régression linéaire. Une autre formulation, proposée en 1960 par Welford (Welford, 1960), permet de corriger cet effet :
\[\begin{equation} MT=a+b\log_{2}(A/W+0.5) \end{equation}\]
Enfin, en 1992, MacKenzie (MacKenzie, 1992) a également proposé sa propre formulation :
\[\begin{equation} MT=a+b\log_{2}(A/W+1) \tag{1.2} \end{equation}\]
Ces différentes équations ne diffèrent que par la formulation de l’\(ID\). L’équation (1.2), connue comme formulation de Shannon, est préférée pour les raisons suivantes (MacKenzie, 1992) :
- elle s’ajuste un peu mieux aux observations,
- elle imite exactement le théorème de Shannon, sous-jacent à la loi du Fitts, et
- elle donne toujours un nombre positif pour l’indice de difficulté de la tâche.
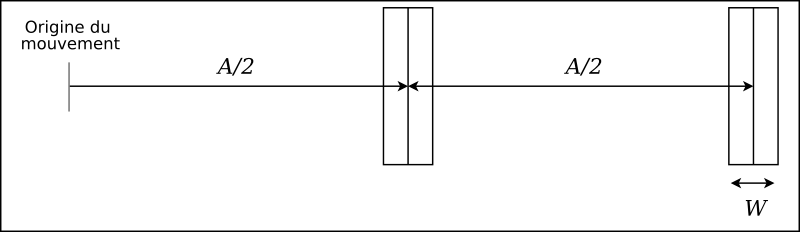
Enfin, on peut citer quelques extensions à la loi de Fitts. En effet, cette loi ne concerne que les gestes allant d’un point à un autre en une seule fois. Mathématiquement, on peut déduire la formulation pour un geste effectué en deux parties (figure 1.7),
auxquels cas, la formulation de l’indice de difficulté \(ID\) sera :
\[ ID\_{2}=2log_{2}\left(\frac{A}{2W}+1\right)\]
et pour n parties (figure 1.8):
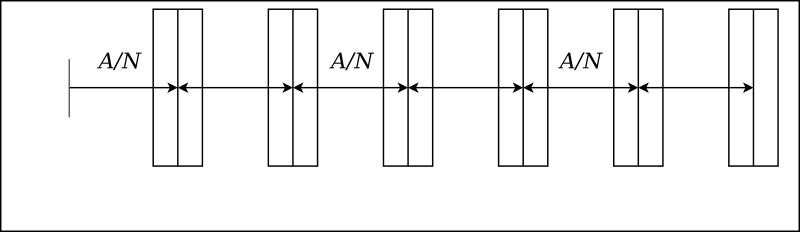
où on aura :
\[ ID\_{N}=Nlog_{2}\left(\frac{A}{NW}+1\right)\]
1.3.2.2 La loi d’Accot
La loi d’Accot ou steering law (Accot and Zhai, 1997) est beaucoup plus récente, et est utilisée pour les mouvements de suivis de chemin. L’application typique de cette loi est l’estimation du temps de sélection d’un item dans un menu déroulant à plusieurs niveaux (figure 1.9).
La loi s’exprime ainsi :
\[\begin{equation} T\_{c}=a+b\int\_{C}\frac{ds}{W(s)} \tag{1.3} \end{equation}\]
où \(T\) est le temps moyen pour suivre le chemin, \(C\) est le chemin paramétré par \(s\), \(W(s)\) est la largeur du chemin à l’abscisse curviligne \(s\), et \(a\) et \(b\) sont des constantes empiriques. Dans le cas général, le chemin est complexe, avec une largeur \(W(s)\) variable.
Des chemins plus simples permettent des simplifications mathématiques. Par exemple, si le chemin est un tunnel droit avec une largeur \(W\) constante, l’équation (1.3) devient :
\[ T=a+b\frac{A}{W}\]
où \(A\) est la longueur du chemin. On peut observer une certaine similarité avec la loi de Fitts.
Il est également possible de dériver les deux côtés de l’équation (1.3) selon la variable \(s\), et obtenir la formulation locale, ou instantanée de la loi :
\[ \frac{ds}{dT}=\frac{W(s)}{b}\]
qui dit que la vitesse instantanée est proportionnelle à la largeur du tunnel. Ceci parait logique si l’on considère l’analogie avec la conduite d’une voiture sur une route : plus la route est large, plus on peut 3 conduire vite, même s’il y a des virages.
1.3.2.3 La loi de puissance 2/3
Tout tracé curviligne peut être décomposé en parties dont chacune possède un rayon de courbure propre et est dessinée à une certaine vitesse tangentielle. L’analyse des mouvements d’écriture et de dessin a montré que la vitesse augmentait dans les parties les moins courbées de la trace et diminuait dans les parties les plus courbées. Malgré la variété de possibilités de moduler la vitesse d’exécution d’une lettre ou d’un trait, tous respectent une règle simple liant la vitesse tangentielle et le rayon de courbure de la trace suivant une loi de puissance de 2/3 (Lacquaniti et al., 1983). Cette covariation a donné lieu à une modélisation mathématique, telle que :
\[ V(t)=kR(t)^{\beta}\]
où \(V\) est la vitesse tangentielle, \(R\) le rayon de courbure et \(k\) une constante appelée gain de vitesse.
En d’autres mots, quand on tourne beaucoup, on va moins vite . On retrouve ici la même affirmation que la loi d’Accot (voir par :La-loi-d’Accot). Il s’agit des mêmes phénomènes.
Il a été montré que la valeur de l’exposant β était constante et fixée à une valeur de 1/3. La force de cette relation a été de montrer que la valeur de cet exposant β pouvait être retrouvée dans des conditions variées d’exécution (par exemple, différentes amplitudes du mouvement ; voir (Viviani and Flash, 1995)). Ces auteurs ont alors postulé que cet invariant reflétait la planification et la programmation du mouvement en référence à une représentation
1.3.2.4 Loi de jerk minimal
Connaissant le point de départ d’un geste, le point d’arrivée, et la durée du geste, quelle est l’équation du geste ? Comment s’assurer que ce geste minimisera les efforts déployés (au moins au niveau de la trajectoire, de l’évolution de la vitesse) ?
La loi de jerk minimal a été proposée par (Flash and Hogan, 1985). Elle tend à exprimer mathématiquement la trajectoire de la main (ou de tout autre extrémité du corps) la plus douce possible.
Pour ce faire, les auteurs ont montré que la douceur d’une trajectoire pouvait d’exprimer en fonction du jerk, c’est à dire la dérivée de l’accélération, ou encore la dérivée 3ème de la position.
Si on note \(x(T)\) la position d’un système, alors le jerk de ce système sera :
\[ \dddot{x}(t)=\frac{d^{3}x(t)}{dt^{3}}\]
La trajectoire optimale (au sens de la douceur ) doit alors minimiser le carré du jerk tout au long de la trajectoire. Mathématiquement, il s’agit de minimiser la grandeur :
\[ H(x(t))=\frac{1}{2}\int\_{t=0}^{T}\dddot{x}^{2}dt\]
où \(T\) est la durée de la trajectoire.
Après un calcul de variation, il s’ensuit que la trajectoire minimisant le jerk et allant d’un point \(x_i\) à un point \(x_f\) en \(d\) secondes aura pour équation :
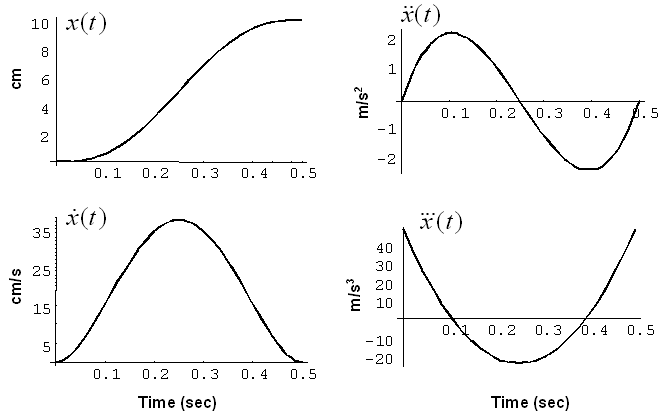
\[\begin{equation} x(t)=x\_{i}+\left(x\_{f}-x\_{i}\right)\left(10\left(\frac{t}{d}\right)^{3}-15\left(\frac{t}{d}\right)^{4}+6\left(\frac{t}{d}\right)^{5}\right) \tag{1.4} \end{equation}\]
Par exemple, la trajectoire pour une geste de 10cm durant 0,5sec sera :
\[ x(t)=800t³-2400t^{4}+1920t^{5},\quad0\leq t\leq0,5sec\]
La figure 1.10 trace cette fonction, ainsi que ses trois premières dérivées : vitesse, accélération et jerk. La forme en cloche de la courbe de la vitesse ẋ(\(T\)) est typique du principe de minimisation du jerk.
(Flash and Hogan, 1985) ont prouvé qu’en deux dimensions ou plus, l’équation (1.4) décrivait la trajectoire assurant le jerk minimum pour chaque dimension. Par exemple, pour un mouvement en deux dimensions, la fonction à minimiser sera :
\[ H\left(\underline{x}(t)\right)=\frac{1}{2}\int\_{t=0}^{T}\left(\dddot{x}^{2}+\dddot{y}^{2}\right)dt\]
et la trajectoire en deux dimensions aura pour équation :
\[\begin{equation} \underline{x}(t)=\left[\begin{array}{cc} x(t) & =x\_{i}+\left(x\_{f}-x\_{i}\right)\left(10\left(\frac{t}{d}\right)^{3}-15\left(\frac{t}{d}\right)^{4}+6\left(\frac{t}{d}\right)^{5}\right)\\ y(t) & =y\_{i}+\left(y\_{f}-y\_{i}\right)\left(10\left(\frac{t}{d}\right)^{3}-15\left(\frac{t}{d}\right)^{4}+6\left(\frac{t}{d}\right)^{5}\right)\end{array}\right] \tag{1.5} \end{equation}\]
L’équation (1.5) implique qu’une trajectoire minimisant le jerk en deux dimensions sera toujours un segment de droite.
1.3.2.5 Le modèle d’impulsion initiale
Le modèle le plus satisfaisant quant à la modélisation des gestes, et notamment les gestes de pointages, a été proposé par (Meyer et al., 1988). C’est le modèle d’impulsion initiale. D’une manière algorithmique, le processus d’une tâche d’acquisition s’exprime ainsi :
- Un mouvement initial est effectué pour atteindre la cible ;
- Tant que le mouvement n’atteint pas la cible,
faire
- refaire un mouvement pour atteindre la cible
Le processus continue jusqu’à ce que la cible soit atteinte. L’objectif de la tâche étant d’atteindre la cible le plus vite possible, dans le cas idéal, le sujet touche la cible en un seul mouvement. Dans la réalité, cependant, la précision d’un tel geste sera très faible.
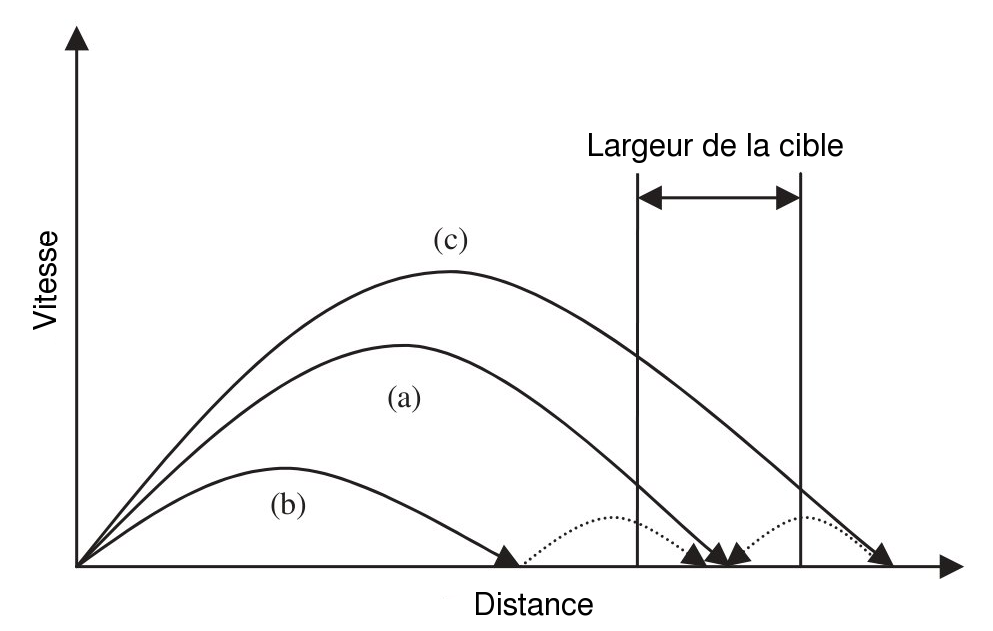
Il a été montré (Meyer et al., 1988) (Rosenbaum et al., 1991) que la déviation standard \(s\) entre la fin du premier mouvement et la cible augmentait avec la distance \(D\) et diminuait avec la durée du mouvement \(T\), selon la loi :
\[ S=k\left(\frac{D}{T}\right)\]
où \(k\) est une constante.
Ceci signifie qu’un mouvement sur une longue distance, exécuté pendant un court laps de temps, est possible, mais aura une déviation standard élevée, soit une faible probabilité d’atteindre la cible. De manière similaire, une série de petits mouvements lents atteindrait très certainement la cible, mais le temps total serait extrêmement long.
La solution mathématique au problème consiste à jouer sur \(D\) et \(T\) de manière à minimiser le temps total (Rosenbaum et al., 1991). Dans les faits, le mouvement optimal consiste en un premier mouvement de grande amplitude et rapide, qui nous amène aussi proche que raisonnablement possible de la cible ; suivi par un ou plusieurs petits gestes correctifs, et plus lents, qui se trouvent être dans les possibilités du système de contrôle moteur.
Nous en terminons ici pour les aspects mathématiques du mouvement, et nous allons reprendre notre ascension des niveaux d’abstraction du système moteur : nous allons parler des gestes.
1.3.3 Le geste : définitions
Geste :Mouvement du corps (principalement des mains, des bras et de la tête) volontaires ou non, révélant un état psychologique, ou visant à exécuter quelque chose. Le Petit Robert - 2001
L’ACROE (Association pour la Création et la Recherche sur les Outils d’Expression) s’est intéressée au geste en le segmentant de la manière suivante :
- Caractérisation quantitative de l’activité gestuelle :
Geste digital (Poignet fixe) : c’est le geste du sculpteur, du pianiste, du violoniste, du dentiste. Il se caractérise par de petits déplacements (3 cm), des précisions élevées (2 mm, 10 mN), des forces élevées (80 N) ;
Geste de transport local (Coude fixe) : c’est le geste de positionnement de proximité par déplacement de l’avant bras sur environ 30 cm avec des précisions en force et en position assez faibles (0,5 cm, 10 N) ;
Geste de déplacement large (Épaule fixe, ou hanche fixe ou libre) : c’est un geste d’approche de faible précision (5 cm, 100 N) par déplacement du bras ou du corps à partir de 60 cm. 2. Caractérisation qualitative et fonctionnelle de l’activité gestuelle (Cadoz, 1994):
une fonction épistémique : le geste sert à connaître (un matériau, une surface, …) et est relative au retour tactile ou haptique (activation du sens tactilo-kinesthésique) ;
une fonction ergotique : le geste sert à déplacer, modifier, construire des objets matériels ; Le geste est lié à la manipulation directe du monde physique ;
une fonction sémiotique : le geste sert à faire connaître : désigner, communiquer ; le geste véhicule une information (qui peut résulter de l’expérience culturelle).
La fonction sémiotique du geste a vu ses caractéristiques précisée par McNeill (McNeill, 1992). Ainsi, un geste sémiotique peut être :
Iconique : le geste est parallèle à un discours concret ;
Métaphorique : le geste est parallèle à un discours abstrait ;
Déictique : c’est un geste de pointage ou de sélection ; ces gestes ont reçu beaucoup d’attention car ils correspondent aux principales tâches sur les systèmes interactifs actuels.
bâton : le geste est un battement rythmique.
Dans cette thèse, nous nous intéressons à la fonction épistémique de l’activité gestuelle, ainsi qu’à la fonction déictique. En effet, la première est relative au retour haptique, et la deuxième aux gestes de pointage.
1.4 L’exploration haptique : quand l’action et la perception se conjuguent sur le canal haptique
Dans cette partie, nous allons nous intéresser à la fusion des capacités de perception et d’action du système haptique. Dans la littérature, il est alors souvent question d’exploration haptique, ou encore de processus exploratoires.
1.4.1 Généralités
Le processus d’exploration haptique met en œuvre plusieurs sous-processus distincts.
Petit exemple : pour déterminer la dureté d’un objet, nous pouvons appliquer une force normale à sa surface, ou bien malaxer l’objet dans la paume de la main si sa taille le permet. Une telle procédure provoquerait un flux d’informations supplémentaires, concernant la température, les capacités de conduction calorifique de l’objet, ainsi que la texture en surface de l’objet, précisément là ou la pression a été effectuée. De plus, si l’information obtenue est jugée insuffisante (pour la reconnaissance de l’objet, ou bien pour l’accomplissement d’une tâche), d’autres processus d’exploration peuvent être lancés.
Les sous systèmes concernés par une tâche d’exploration haptique sont :
- le système cognitif,
- les fonctions de prise de décisions,
- le système moteur,
- et les sensations psychophysiques issues de l’interaction avec les objets.
(Loomis and Lederman, 1986) et (Lederman et al., 1987) ont proposé que le système haptique pourrait être composée de deux sous systèmes. Le système sensoriel, et le système moteur. Selon leur interprétation, le système moteur sert à augmenter les performances du système sensoriel, en optimisant l’efficacité de l’exploration haptique des objets. Dans cette vision des phénomènes, il est possible de concevoir le processus haptique comme la mise en œuvre de fonctions haptiques de haut niveau (fonctions cognitives), et de fonctions haptiques de bas niveau (fonctions psychophysiques). Les fonctions haptiques de haut niveau seraient amenées à diriger les fonctions haptiques de bas niveau ; mais pas uniquement.
exemple : si l’on décide d’aller extraire une information de surface d’un objet, cela aura pour conséquences l’exécution d’une procédure exploratoire (optimale pour cette information), qui se manifestera par une série de mouvements de la main. L’interaction entre la surface de l’objet et la peau lancera la stimulation des sens haptiques, provoquant la perception de l’information recherchée, et par conséquent, un modèle mental concernant la nature la surface de l’objet, se forme.
Une telle opération de haut en bas se produit quand un observateur est dirigé vers la recherche d’une information particulière d’un objet. Cependant, l’exploration haptique peut être dirigée de bas en haut . Dans l’exemple précédent, et suivant les informations perceptuelles induites par l’exploration, l’opérateur peut être conduit à explorer plus loin pour trouver d’autres informations, qu’il ne cherchait pas nécessairement au départ.
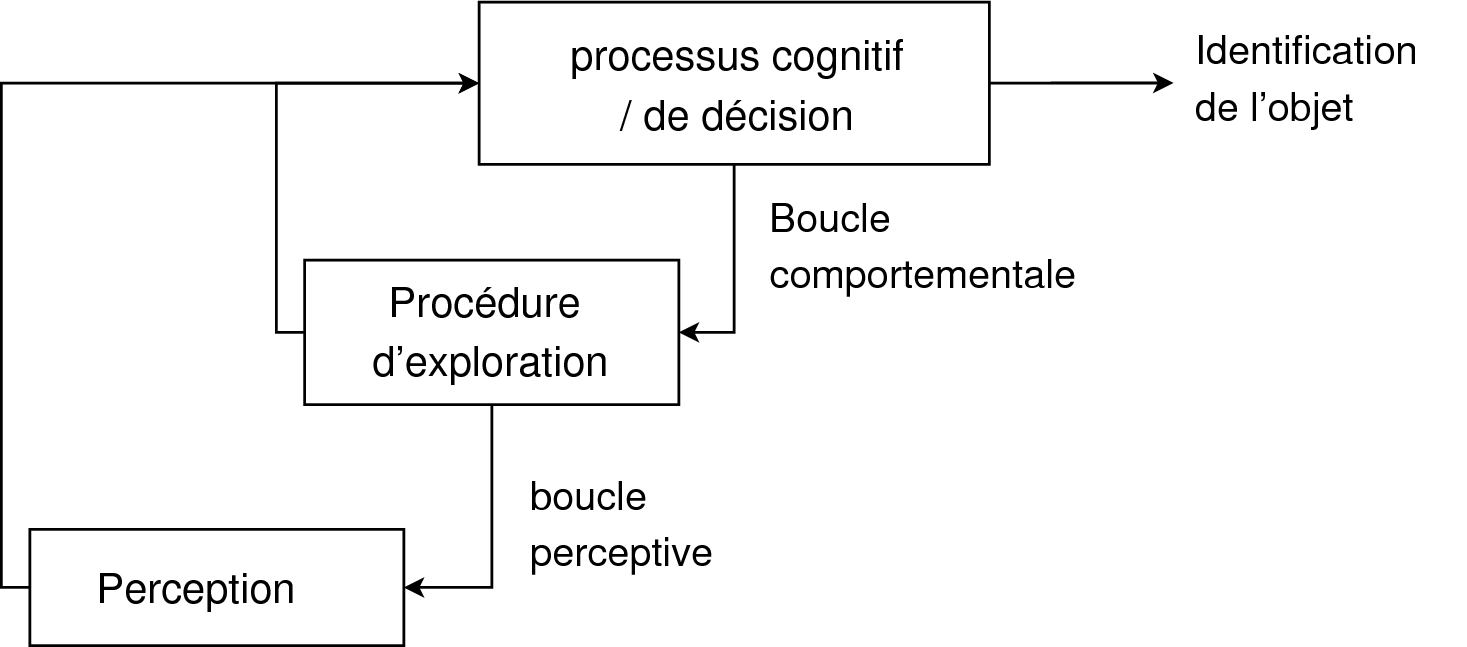
Ainsi, la stimulation des mécanorécepteurs provoque une réponse neurale qui dicte l’exploration suivante. C’est la boucle comportementale (Taylor et al., 1973).
La figure 1.12 illustre les boucles de rétroaction se produisant lors de l’exploration haptique. Dans la littérature, l’ensemble de ses boucles, ramené à la dualité de fonctionnement du système (de haut en bas / de bas en haut ) a mené aux notions du contact actif et passif . Ainsi, pendant le contact actif, un opérateur exécute l’exploration haptique sans contrainte, déplaçant la main en contact avec un objet. Réciproquement, pendant le contact passif, la main de l’explorateur demeure stationnaire, alors que l’objet est déplacé en contact avec la peau.
Initialement, ces concepts étaient mutuellement exclusifs (Gibson, 1962). Pourtant, (Lederman and Taylor, 1972) ont proposé que les concepts d’actif et de passif ne constituaient pas nécessairement une dichotomie, mais que le processus de contact pourrait être considéré comme ayant un certain degré de passivité . Ce degré dépendrait du niveau de contrôle qu’a l’opérateur sur le processus de contact.
Pour terminer, (Faineteau et al., 2003) ont mené des expériences quant à la perception des distances avec le sens haptique. Les résultats de ces expériences peuvent se résumer de la manière suivante :
- Les courtes distances sont généralement sur-estimées, et les longues distances sont sous-estimées.
- La mémoire des distances est plus volatile que la mémoire des positions.
- La reproduction d’un mouvement actif, en terme de distance et de position, est plus exacte que pour un mouvement passif (c’est à dire aidé par un dispositif).
1.4.2 De l’utilisation d’outils
L’outil est très souvent le lien entre l’humain et la tâche.
On peut citer quelques exemples du triplet Opérateur-Outil-Tâche pour les métiers :
- Le couturier - l’aiguille - la couture,
- le chirurgien - le scalpel - l’incision,
- ou encore, le chirurgien - le forceps laparoscopique, la laparoscopie…
et d’autres exemples pour des tâches à base technologiques. On oublie ici la spécificité de l’opérateur : on obtient des couples Outil-Tâche :
- Tournevis - Vis,
- Ciseaux - Découper…
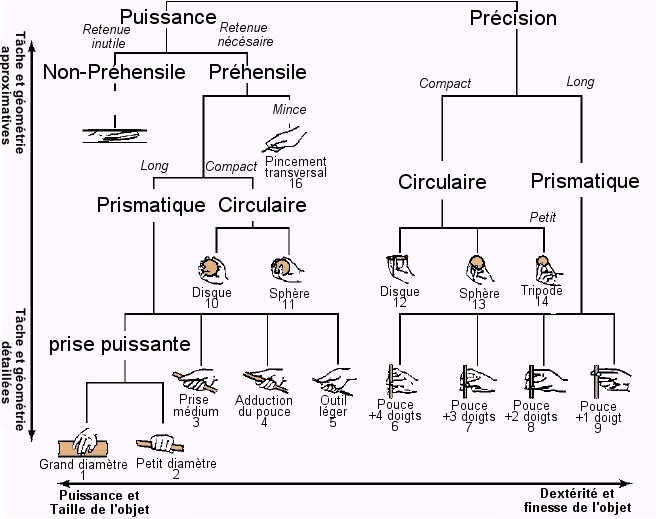
(Dennerlein et al., 2000) ont proposé une taxonomie des prises d’outils avec la main, selon deux axes (figure 1.13).
Les implications psychologiques de l’utilisation d’outils sur les processus d’exploration haptique à l’aide d’outils (le contact à distance ou remote contact) ont récemment été le centre de beaucoup d’intérêt. En effet, il semble qu’il y ait équivalence entre les sensations produites lors de l’utilisation d’un outil, et celles ressenties à l’aide de dispositifs à retour de force.
1.4.3 Les mouvements d’exploration
(Lederman et al., 1987) ont identifié les différents modèles des mouvements d’exploration haptique. Dans la liste qui suit, sont indiqués entre parenthèse les propriétés associées à chaque mouvement d’exploration :
Le mouvement latéral (textures) : Typiquement, les doigts frottent dans les deux sens une petite zone. Des surfaces intérieures sont explorées, plutôt que des bordures.
La pression (conformité) : Une force ou un couple est appliqué à l’objet, ce dernier étant stabilisé.
Le contact statique (température, étirements) : L’objet est soutenu, tandis qu’une main se repose passivement sur lui.
Le maintient (poids) : L’objet est soulevé et maintenu dans la main, sans chercher à le serrer. Il s’agit typiquement d’un effort du bras ou du poignet.
L’enveloppement (forme, volume global) : La main assure le plus de contacts possibles avec l’objet. Les doigts, la paume sont mis à contribution.
Le suivi de contours (forme, volume exact) : Le mouvement est continu et non-répétitif sur un bord de l’objet. Une main peut maintenir l’objet en place.
Les résultats expérimentaux ont indiqué que dans une tâche libre d’exploration, le mouvement de la main dépendait de la caractéristique recherchée.
1.5 Conclusion
Il s’agissait, dans ce chapitre, de se familiariser avec la très riche terminologie liée au geste et à la perception haptique.
Nous avons également relevé quelques propriétés psychophysiques qui nous intéresseront par la suite, comme le fait que nous ayons une meilleure mémoire des positions et une meilleure reproduction d’un mouvement actif. Il nous apparaît également important de souligner la dualité du système haptique : nous avons un système perpétuel (l’information va du monde extérieur vers nous) intimement lié au système moteur (l’information part de nous, et va vers l’extérieur).
Dans le chapitre suivant, le monde extérieur sera une machine ou un ordinateur : on parle alors d’interaction homme-machine, ou de communications homme-machine.