Chapitre 4 Vers l’accessibilité
4.1 Introduction
Avec les interfaces graphiques à manipulation directe (GUIs), l’utilisateur interagit avec l’ordinateur à l’aide d’un écran, d’un dispositif de pointage - en général une souris - et d’un clavier. Ces interfaces sont dites faciles à apprendre et à utiliser, grâce à une spatialisation de l’information qui réduit la charge cognitive de l’utilisateur. Toutefois, ce schéma d’interaction est incomplet : il exclut les utilisateurs non-voyants.
Dans ce chapitre, nous allons tâcher de synthétiser ce que la littérature nous indique quant à l’accès des non-voyants aux systèmes interactifs, tout d’abord dans un cadre général; puis dans un contexte d’utilisation du système haptique.
4.2 L’interaction non-visuelle
4.2.1 Définitions du handicap
La déclaration des droits des personnes handicapées proclamée par l’assemblée générale de l’Organisation des Nations Unies le 9 décembre 1975 indique que « toute personne dans l’incapacité d’assurer par elle-même tout ou partie des nécessités d’une vie individuelle ou sociale normale, du fait d’une déficience, congénitale ou non, de ses capacités physiques ou mentales » est une personne handicapée.
En 1980, l’organisation Mondiale de la Santé (Organization et al., 1980), dans le rapport du rhumatologue britannique, Philip WOOD, introduit une clarification conceptuelle dans la définition du handicap, reprise en France sous le titre de ” Classification internationale des handicaps (CIH) : déficiences, incapacités, désavantages. Il y est défini le handicap comme la conséquence des maladies sur la personne suivant trois plans :
la déficience, correspondant à l’altération d’une structure ou d’une fonction psychologique, physiologique ou anatomique. La déficience peut-être temporaire ou définitive;
l’incapacité, qui est une réduction partielle ou totale de la capacité d’accomplir de façon normale une activité. L’incapacité est en quelque sorte la conséquence fonctionnelle de la déficience mais elle ne dépend pas obligatoirement de celle-ci. D’autre part, une déficience peut très bien ne s’accompagner d’aucune incapacité;
le désavantage ou le handicap, conséquence de la déficience ou de l’incapacité sur les conditions d’insertion sociale, scolaire ou professionnelle.
Dans l’union européenne, c’est près d’un tiers de la population qui souffre de troubles divers (voir le tableau 4.1).
| Type de troubles | Estimation (en millions) | % des personnes handicapées | % de la population |
|---|---|---|---|
| Physique | 24.80 | 68% | 7.7% |
| Visuel | 6.50 | 15.80% | 2% |
| Auditif | 8.70 | 23.90% | 2.7% |
| Mental | 7.40 | 20.30% | 2.3% |
| Communication verbal | 3.60 | 10% | 1.1% |
Le tableau 4.2 montre les statistiques sur les populations mal-voyantes et non-voyantes. En France, sur 18000 aveugles en âge de travailler, environ 6000 travaillent, dont 1500 manuels (les 2/3 en secteur protégé), 1500 standardistes, 1300 masseurs kinésithérapeutes, 600 enseignants (en milieu spécialisé ou ordinaire), 400 sténodactylos, 300 musiciens professionnels, 300 divers (juristes, cadres de la fonction publique, informaticiens); plus de 50% ne peuvent trouver du travail. [Quid 2005]
| Troubles visuels | Aveugles + mal-voyants | |
|---|---|---|
| Monde (OMS février 2000) | 160 000 000 | 45 000 000 |
| France (1997) | 1 500 000 | 110 000 + 250 000 |
| % de la population française | 2.6% |
Enfin, la France a voté le 12 février 2005 la loi n°102-2005 pour l’égalité des droits et des chances, la participation et la citoyenneté des personnes handicapées, dont l’article 47 rend obligatoire l’accessibilité des sites Web du secteur public.
4.2.2 Les capacités sensorielles chez les non-voyants
(Grant et al., 2000) ont conduit une étude sur des personnes non-voyantes et voyantes. Il s’agissait d’apprécier la précision de la perception tactile des deux populations, et établir un éventuel lien entre le handicap et les capacités sensorielles. En fin de compte, cette étude a prouvé que les non-voyants obtenaient de meilleurs résultats que les voyants au début des tests, mais que cet avantage diminuait au fur et à mesure, jusqu’à disparaître.
En fait, il a été souvent dit que les aveugles développaient des capacités sensorielles supra-normales, telles que l’acuité auditive, ou somesthésique. Dans la pratique, cependant, il a été prouvé que l’acuité haptique (Heller, 1989) était équivalente chez les non-voyants congénitaux, chez les non-voyants accidentels et chez les personnes voyantes.
4.2.3 La représentation mentale d’un document par une personne non-voyante
Une personne aveugle se sert énormément de sa mémoire et relativement peu de ses sens, alors que l’activité d’une personne voyante est essentiellement basée sur la vue et la coordination oeil-main.
Pourtant, les travaux de (Hatwell, 1993) et de (Martial, 1998) ont montré que la représentation mentale des non-voyants est identique à celle des voyants. En effet, même si l’on parle habituellement de mémoire visuelle, lorsque l’on considère la représentation mentale de quelque chose, tout est basé sur l’expérience de l’espace. En d’autres mots, pour se construire une représentation mentale de ce qui leur est décrit, une personne aveugle s’appuiera sur les notions qu’il a de l’espace : en haut, à droite, à l’est, derrière.
Dans une autre expérience, (Manghi, 2003) a demandé à ses sujets (l’étude portait sur des voyants et des non-voyants, et explorait également les effets de l’âge) de décrire un trajet dans une ville à quelqu’un. Les résultats se sont révélés très intéressants :
- Les personnes non-voyantes ont obtenu des résultats équivalent quant au taux de réussite de la tâche,
- Leurs descriptions d’itinéraires ont été surtout
jugées plus pertinent, avec notamment l’utilisation
- de repère absolus (le nord, le banc sur le trottoir…)
- de précisions dans les mesures (angles, distances),
- de repères multimodaux (le carrefour, le marteau-piqueur…)
Il y a cependant, entre un voyant et un non-voyant, une différence très importante, lors de l’accès aux documents textuels : le non voyant ne peut pas se faire une idée globale de la forme du texte. Inversement, lors d’une tâche de lecture, une personne voyante peut parcourir l’ensemble du document très rapidement, et par exemple, repérer rapidement l’item qui l’intéresse.
Pour se faire une idée assez rapide du texte avant la lecture, les non-voyants utilisent une synthèse vocale réglée sur un débit rapide. Cependant, la mémoire auditive demande une grande concentration. Ainsi, l’utilisation d’une autre modalité, comme le toucher, peut permettre de réduire la charge mentale.
En conclusion, un non-voyant se construit une image mentale identique en tout point à celle d’une personne voyante. Cependant, la construction d’une telle représentation mentale nécessite une description de la disposition globale, ou des mécanismes de navigation dans le document. Enfin, on pourra s’appuyer sur une grande précision dans les descriptions.
4.2.4 Modalités non-visuelles disponibles en sortie
Contrairement à ceux de l’être humain, les médias non visuels en sortie restent limités (tableau 4.3). Les systèmes basés sur les sens de l’odorat et du goût restent très rares. Maintenant, les périphériques de pointage à retour d’effort se démocratisent de plus en plus (voir 2.5.2).
| Sens perceptifs humain | Médias informatiques | Stimuli | Récepteurs |
|---|---|---|---|
| Ouïe | Haut-parleurs, casque audio | Parole, bruit, son | Oreilles |
| Haptique | Afficheur braille, sondes chauffantes, système à retour de force | Texture, température, mouvement | Peau, Muscles, tendons, corps |
| Odorat | ? | Odeurs | Nez |
| Goût | ? | Saveur | Langue |
4.2.5 Utilisation et justification de la multimodalité
(Dufresne et al., 1995) ont montré l’impact et l’intérêt de la bimodalité audio-haptique pour les utilisateurs non-voyants. Le tableau 4.4 indique le pourcentage de bonnes réponses dans trois situations modales; pour 12 voyants et 12 non-voyants. Il est à noter que dans cette expérience, les sujets non-voyants ont obtenus de meilleurs scores : leur concentration était supérieure.
| Modalité | Testeurs non-voyants : 12 | Testeurs voyants : 12 | Total : 24 |
|---|---|---|---|
| Audio | 68% | 62% | 64% |
| Haptique | 78% | 71% | 74% |
| Audio + haptique | 83% | 78% | 80% |
| Total | 76% | 70% | 73% |
4.3 L’accessibilité : définitions
The power of the Web is in its universality. Access by everyone regardless of disability is an essential aspect.
Tim Berners-Lee, l’inventeur du World Wide Web
4.3.1 L’accessibilité par Tim Berners-Lee, directeur du W3C et inventeur du World Wide Web
Mettre le Web et ses services à la disposition de tous les individus, quel que soit leur matériel ou logiciel, leur infrastructure réseau, leur langue maternelle, leur culture, leur localisation géographique, ou leurs aptitudes physiques ou mentales.
L’accès à l’information et à la communication est un droit universel. Le web est devenu un média majeur, et il se doit d’être accessible à tous sans discrimination. Concevoir dans le cadre du design for all (conception pour tous), c’est anticiper sur les usages, répondre à une logique de développement durable et surtout, utiliser la technologie dans le respect des individualités.
4.3.2 L’accessibilité par Denis Chêne, France-Télécom R&D
Être accessible c’est avant tout permettre l’accès. L’accès aux informations (documents, nouvelles, bases de données) ; l’accès aux échanges, qu’il s’agisse des échanges en terme de communication (audio, vidéo, texte…) ou des échanges de biens de consommation (achats divers, gestion monétaire…).
Mais, être accessible c’est aussi permettre l’utilisation, car rien ne sert d’accéder si l’on ne peut utiliser. Consulter , c’est bien, mais faire , c’est mieux.
La richesse du numérique, c’est sa malléabilité. La malléabilité permet en effet de reformuler les données échangées de façon à correspondre à chaque type d’utilisateur et de situations. Il existe en effet de nombreux types d’utilisateurs différents, qui accèdent à l’information de façons diverses, selon des contextes variés (absence de visibilité, d’audition, de motricité, de compréhension). Rendre l’information et les échanges accessibles, c’est optimiser, pour chaque individu, pour chaque contexte d’usage, l’acquisition, la production, et la manipulation d’informations et d’éléments pouvant être atteints sur ou via le web.
La richesse du web c’est son gigantisme. D’aucun diront qu’il est impossible, sur une telle masse, de gérer toutes les individualités et tous les contextes, et que ’faire du spécifique’ est coûteux et peu rentable. Certes, mais l’objet n’est justement pas de faire du spécifique, mais du générique qui puisse servir à tous, sans exception. Ce faisant, l’accessibilité est moins coûteuse : l’araignée gagnera à tisser une toile solide plutôt qu’une toile fragile aux nombreuses rustines ; et plus rentable : davantage d’utilisateurs pourront y accéder dans plus de contextes d’usages.
Au final, l’accessibilité résulte d’une conception pour tous . Or, la richesse de l’être humain, c’est sa diversité.
4.3.3 La Web Accessibility Initiative (WAI) du World Wide Web Consortium (W3C)
Le World Wide Web Consortium, abrégé W3C9, est un consortium fondé en octobre 1994 pour promouvoir la compatibilité des technologies du World Wide Web telles que HTML, XHTML, XML, CSS, PNG, SVG et SOAP. Le W3C n’émet pas des normes, mais des recommandations.
Le consortium laisse le soin aux fabricants de suivre les recommandations. Contrairement à l’Organisation internationale de normalisation ou d’autres corps internationaux de standardisation, le W3C ne possède pas de programme de certification, et beaucoup de standards ne définissent pas formellement un niveau de conformité. Ils sont ainsi souvent implantés partiellement.
Concernant l’accessibilité, le W3C a créé des recommandations à travers le projet WAI (Web Accessibility Initiative) en 1996. Ces recommandations s’adressent à tous les distributeurs de contenu numérique par Internet : navigateurs, documents HTML, logiciels d’édition de HTML, logiciel du publication de site Web créant le code HTML.
Les recommandations de la WAI actuellement en vigueur sont :
- les Authoring Tool Accessibility Guidelines (ATAG) qui posent les règles d’accessibilité pour les outils d’édition.
- les Web Content Accessibility Guidelines (WCAG) qui montrent comment créer des documents Web avec un contenu accessible aux utilisateurs souffrant de handicaps.
- les User Agent Accessibility Guidelines (UAAG), enfin, posent les règles pour l’accessibilité des agents utilisateurs.
On pourra se référer aux annexes, pour plus de détails.
4.3.4 Autres aspects de l’accessibilité
L’accessibilité n’est pas une fonctionnalité, mais bien un processus (une méthode) que l’on intègre tout au long du cycle de vie d’un projet.
Pierre Guillou (responsable de la cellule accessibilité de l’association BrailleNet)
4.3.5 Accessibilité: notre positionnement
Nous nous positionnons pour une accessibilité au sens large. Il s’agit d’une approche visant à étendre la démarche d’accessibilité au delà d’un public spécifique. En employant l’illustration du <
>, concevoir un site Web accessible pour une personne non-voyante, rendra ce site Web plus simple d’usage pour l’ensemble des utilisateurs. La problématique de cette thèse traite de l’utilisation de dispositifs à retour de force en matière d’accessibilité, à priori pour les personnes souffrant d’handicap visuel; maintenant, quand nous proposerons des solutions techniques utilisables spécifiquement par des personnes handicapées, les concepts utilisés, et les solutions techniques retenus peuvent (et doivent) être reprises dans des contextes plus larges; dans des situations où le sens de la vue serait mobilisé sur une autre tâche, par exemple.
Nous allons cependant passer en revue ce qui a déjà été réalisé spécifiquement pour des personnes souffrant d’un handicap visuel, en matière d’accessibilité, et mettant en œuvre des dispositifs haptiques. Nous retiendrons que ces approches peuvent être reprises sans public spécifique, avec une interaction augmentée par le sens haptique.
4.4 L’accessibilité des personnes non-voyantes et mal-voyantes grâce à un dispositif à retour haptiquetitre”)
L’idée de base de l’utilisation de périphériques à retour haptique pour des utilisateurs non-voyants, est de palier, autant que raisonnablement possible, à l’absence de canal visuel. Dans cette approche, plusieurs contextes d’utilisation ont été explorés.
Nous allons les étudier plus précisément, afin de dégager des pistes pour notre propre approche.
4.4.1 Identifier le contenu et l’agencement d’un document
D. Offen et B. Thomlinson ont développé une librairie de programmation permettant d’identifier l’agencement d’un document (Offen and Thomlinson, 2001). L’OPENBook (c’est le nom de la librairie) est ainsi capable d’identifier les colonnes, les titres, les blocs de texte, les illustrations, les légendes, les tableaux, les entêtes et les pieds de pages. Un synthétiseur vocal permet de lire le contenu du document. Le périphérique utilisé est la souris Wingman Force Feedback de Logitech. L’utilisateur pourra alors accéder à l’information de plusieurs manières :
- Le mode « Page Layout Summary » (pour résumé de la disposition de la page) rapportera le nombre d’éléments de chaque type visibles sur la page. Par exemple 1 titre, 2 colonnes, 1 illustration .
- Le mode « Guided Layout » (pour disposition guidée) , l’utilisateur sera passif, et se laissera guider (ainsi que sa main avec la souris à retour de force) dans un ordre logique dans la lecture du document. Le synthétiseur vocal annonçant le nom de chaque élément.
- Avec le mode « Explore Layout » (pour disposition explorée), l’utilisateur est actif, et contrôle le mouvement d’un élément à un autre, en entendant la synthèse vocale lui dire de quoi il s’agit.
4.4.2 Toucher un document graphique
C. Ramstein est un des pionniers dans les interfaces utilisateur haptiques pour des personnes ayant un handicap visuel (Ramstein et al., 1996). Il a été à la tête de Haptic Technologies Inc. qui fabriquait et vendait les systèmes de PenCAT/MouseCAT et de TouchDesktop (c’est la couche logicielle qui gère les périphériques de Haptic Technologies). Le travail de Ramstein s’appuie sur des interfaces multimodales. L’information haptique est combinée avec l’information sonore et l’affichage Braille.
J. P. Fritz et K. E. Barner [Department of Electrical and Computer Engineering at the University of Delaware] ont travaillé depuis l’apparition du PHANTOM, sur un système haptique de visualisation pour des personnes avec handicap visuel (Fritz and Barner, 1996) (Fritz and Barner, 1999). Le cœur du projet n’est pas basé sur une traduction des interfaces utilisateurs en information haptique mais sur l’utilisation de formes haptiques virtuelles. Ainsi, leurs travaux visent à transcrire de l’information non-textuelle, telle que des figures mathématiques, ou des tableaux contenant des données scientifiques. Leur approche consiste à générer une forme tridimensionnelle, et à lui donner une existence haptique grâce au PHANTOM.
Les laboratoires de British-Telecom ont étudié l’utilisation d’un affichage haptique couplé au VRML (Virtual Reality Markup Language), le format pour l’affichage des graphiques 3D sur le Web (Hardwick et al., 1998). Le travail est basé sur une expérience acquise du développement d’un navigateur capable de piloter un retour de force à partir d’un fichier VRML. On retrouve ici l’approche de la bibliothèque de programmation Ghost™SDK de Sensable : le dispositif de pointage remplace le doigt de l’utilisateur dans l’espace virtuel, et permet de toucher les objets.
Dans ces trois premières approches, il s’agit de découvrir un objet tridimensionnel à l’aide d’un dispositif de pointage à retour de force. On retrouve ainsi les limitations suivantes issues du tableau 2.1 :
|———————-|————————————————————-| | L’enveloppement | Non possible en l’absence de plusieurs points de contact | | Le suivi de contours | Possible, mais très difficile du fait d’une zone de contact |
J. A. Gardner et V. Bulatov (Gardner and Bulatov, 2001) se sont appuyés sur le format SVG (Scalable Vector Graphics) qui est le format XML pour les images vectorielles. Associé à une souris à retour de force et à un retour sonore, des images peuvent être rendue accessibles, tant qu’elles ne sont pas trop complexes aux non-voyants. Il s’agissait par exemple de localiser les positions des différentes régions sur une carte géographique, grâce au rendu d’une texture particulière et d’un retour sonore, quand le pointeur de la souris passe au centre d’une chaque région. Cette approche est très similaire à ce que nous avons réalisé, voir la section 5.3.
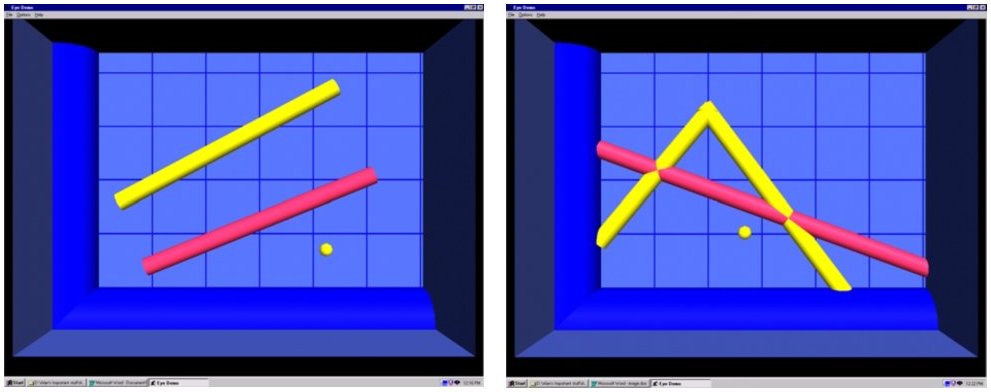
Wai Yu, de l’université de Glasgow a beaucoup étudié l’utilisation d’une souris à retour de force ou du PHANTOM dans les problèmes d’accessibilité. Il a proposé tout d’abord une méthode permettant aux non-voyants d’accéder à des graphiques mathématiques à l’aide du PHANTOM (Yu et al., 2001). La figure 4.1 est issue de cette application : lorsqu’il passe à proximité d’un des segments, le pointeur du dispositif est attiré sur lui.
Plus tard, il a continué son travail en proposant cette même accessibilité dans un contexte Web : l’application tourne dans un navigateur internet et utilise la souris Wingman Force Feedback. Pour cela il a exploré la construction automatique de graphiques haptiques (Yu et al., 2002), puis, il a donné à l’utilisateur non-voyant, la possibilité de créer ses propres graphiques (Yu et al., 2003).
Enfin, (Sjostrom, 2002) a également étudié le rendu de graphiques mathématiques, mais uniquement à l’aide d’un PHANTOM. Son approche cherche à être plus proche d’une réelle situation pédagogique. On peut citer les histogrammes haptiques, obtenus par effet de cloisonnement, ou les courbes mathém’haptiques , qui comme pour Wai Yu, sont issues d’un effet d’attirance sur la courbe.
4.4.3 Permettre d’appréhender les formes et les textures
(Fritz and Barner, 1996) ont développé une méthode synthétisant des textures haptiques perceptiblement distinctes en utilisant des techniques de modélisation stochastiques. Leur but était de créer un ensemble de textures qui pourraient alors être utilisées pour décrire des illustrations complexes de données.
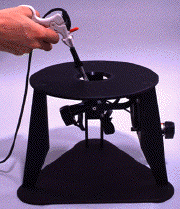
Dans ces travaux, les périphériques utilisés sont 2.18">des PHANTOMs ou l’Impulse Engine 3000 (figure 4.2). En effet, pour générer des textures probantes, il est nécessaire d’utiliser du matériel disposant d’une résolution spatiale très fine : 0.03mm et 0.01mm respectivement pour le PHANTOM et l’Impulse Engine 3000.
(Colwell et al., 1998) a étudié la perception des textures, des formes et des objets virtuels par des sujets voyants et non-voyants à l’aide de l’Impulse Engine 3000 (figure 4.2). Ces travaux font partie des grandes références du domaine (voir les Recommandations de conception.
Enfin, (Sjostrom, 2001) a étudié la perception de textures issues du monde réel. Les travaux précédents utilisaient des méthodes stochastiques pour générer leurs textures. Sjöström s’est inspiré de la technique du Bump-Mapping pour générer ses textures.
Au final, toutes ces études soulignent le fort potentiel de l’utilisation de textures dans les systèmes interactifs, du fait de bonnes capacités psychophysiques pour discriminer deux textures différentes.
4.4.4 Interface graphique haptiquement augmentée
C’est la piste qu’ont suivis (Dufresne et al., 1995), (Ramstein, 1996), (O’Modhrain and Gillespie, 1997) et (Rosenberg, 1997).
Il s’agit d’opérer une traduction de ce qui apparaît à l’écran en effets haptiques via un périphérique adapté. Les périphériques utilisés sont du type souris. Quelques exemples d’effets proposés par le FEELiT DeskTop d’Immersion Corporation, par The Moose de Guillepsie ou le Multimodal User Interface System de Ramstein :
- Le passage du pointeur de la souris au-dessus d’une icône ou d’un item d’un menu déroulant provoque un choc dans la main de l’utilisateur ou encore un effet magnétique est ressenti. Guillepsie a utilisé la notion d’hapticon.
- Le glisser-déposer trouve sa métaphore enrichie : on a réellement l’impression de porter quelque chose avec sa souris, puisque qu’elle semble avoir beaucoup d’inertie lorsque l’on porte un document. Le raffinement peut même aller jusqu’à rendre l’inertie du périphérique maniant du pointeur, proportionnelle à la taille (en Mo) du dossier/fichier déplacé.
- Les bords des fenêtres deviennent apparents (toujours haptiquement), avec des notions d’intérieur et d’extérieur.
Cette approche permet de rajouter le retour haptique en tant que modalité parallèle et redondante à celles déjà utilisées : le retour visuel tout d’abord, et le retour sonore ensuite dans le cadre d’une utilisation par des non-voyants. Cependant, l’approche consistant à prendre comme base l’interface graphique pour la traduire en retour haptique, bien qu’étant la plus intuitive, reste bridée. En effet, l’interface graphique n’a été conçue ni pour une utilisation par des non-voyants, ni pour être traduite en effets de force. Les éléments à faire apparaître haptiquement sont trop nombreux et les effets finissent par se chevaucher, et s’annulent ou s’amplifient par phénomène de résonance.
4.4.5 L’accessibilité à l’Internet, via le mode haptique
Très récemment, Wai Yu et ses collègues ont proposé un système multimodal de présentation de pages Internet (Yu et al., 2005). Il s’agissait d’appliquer l’approche qu’il a utilisée sur les graphiques mathématiques, au pages Internet. Par exemple, la proximité du pointeur de la souris avec une image ou un lien, se matérialisait par un retour sonore (synthèse sonore ou sonification) et haptique (par une souris à retour de force). L’intérêt de leur approche vient de l’utilisation de logiciels et de matériels courants : Internet Explorer ou Mozilla Firefox pour les navigateurs employés, la souris Wingman Force Feedback et son WebPlugin pour le dispositif haptique.
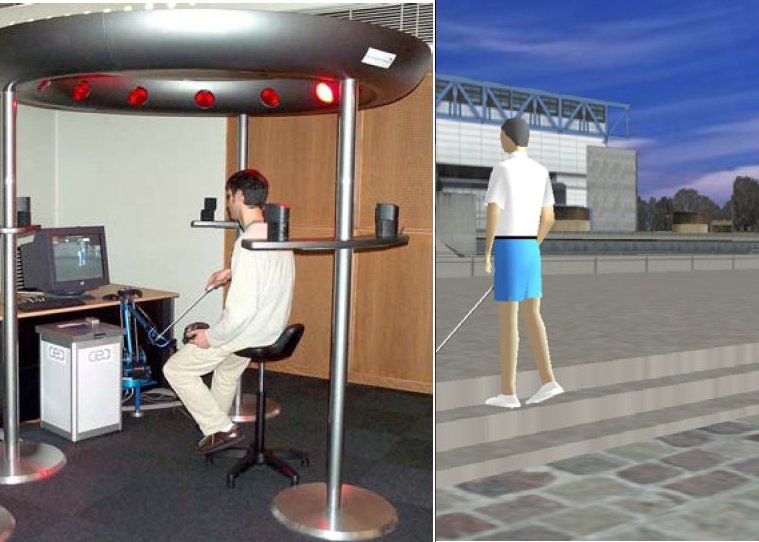
4.4.6 L’accessibilité dans le monde réel : Homere
Homere est un système qui a été réalisé par la société ONDIM10, en partenariat avec le Commissariat à l’Energie Atomique et PSA Peugeot Citroën (Lécuyer et al., 2003). Il s’agit d’un système d’assistance à la reconnaissance d’itinéraires urbains pour aveugles et malvoyants. Le dispositif haptique revient à simuler une canne blanche virtuelle. L’ensemble du système permet la reconnaissance d’un itinéraire au sein de la Cité des Sciences et de l’Industrie.
4.5 Recommandations de conception
(Colwell, 2001) a déduit de ses expériences une série de recommandations quant à l’utilisation du mode haptique pour les non-voyants :11
- Les utilisateurs doivent être capables d’une discrimination aisée entre les différentes textures simulées; il ne faut pas partir de l’hypothèse comme quoi les variations des paramètres de génération d’une textures sont facilement détectables par autrui.
- La perception des textures peut varier d’un utilisateur à l’autre, tant sur la perception des éléments de la texture, que sur la manière dont la texture est ressentie (i.e. qu’est-ce qui est plus dur, qu’est-ce qui est plus doux ?).
- La perception des dimensions est plus précise sur un grand objet virtuel que sur un petit.
- La taille d’un objet virtuel est perçue comme étant plus grande lorsque l’objet est exploré de l’intérieur, et plus petite lorsque l’objet est exploré de l’extérieur.^[Les recommandations
- et (4) suggèrent que si la taille des objets est un paramètre important, il peut être nécessaire de biaiser la taille de l’objet virtuel par rapport à sa taille réelle.]
- Les objets virtuels n’ont pas besoin de suivre les lois de la physique de la même manière que dans le monde réel. Notamment, les utilisateurs peuvent passer à travers la surface d’un objet. Ce sont les contraintes technologiques qui ne permettent pas de rendre tous les aspects physiques d’un objet sur son avatar virtuel. Pour autant, cela ne semble pas déranger les utilisateurs pour pousser un objet même en passant au travers de sa surface, mais un soin particulier doit être apporté pour respecter le maximum des autres lois de la physique.
- Les utilisateurs peuvent rencontrer des difficultés pour orienter des objets virtuels dans l’espace; si cela s’avère important dans la tâche, d’autres mécanismes peuvent être utilisés (par exemple, en ajoutant un sol ou des murs à l’espace virtuel).
- Les utilisateurs peuvent avoir besoin d’apprendre des stratégies d’exploration avec un périphérique particulier. Ceci n’est certainement pas long, mais autant proposer de telles stratégies aux utilisateurs.
- Les utilisateurs peuvent ne pas appréhender des objets trop complexes depuis une information purement haptique; une information multimodale peut alors être utilisée pour donner un sens aux objets complexes.
- Les objets virtuels complexes sont souvent constitués de plusieurs composants. La modélisation tridimensionnelle peut générer des petits vides entre ces composants. Lors de l’exploration haptique, le curseur peut s’y coincer. Tout ceci ne peut que perdre l’utilisateur lors de l’exploration haptique d’un objet virtuel.
- Les utilisateurs peuvent se perdre dans l’espace haptique. Il est nécessaire de proposer un mécanisme donnant des informations sur la navigation, afin d’éviter ce problème.
- Les utilisateurs peuvent avoir différents modèles mentaux de ce qu’est l’espace virtuel et de quelle partie du périphérique est en train de toucher l’objet virtuel. Il faut veiller aux conséquences de ces facteurs.
De même, (Sjostrom, 2002) a proposé ses recommandations plus spécifiquement dédiées la conception de l’interaction haptique non-visuelle :
- L’objet : Élaborer un objet virtuel en tant que tel : l’objet peut ressembler à un objet réel, mais il faudra aussi tenir compte des caractéristiques de la perception pendant sa conception.
- La navigation : Faciliter la navigation ainsi que la vue générale : en proposant des points de références pour éviter à l’utilisateur de se perdre (c’est à dire de mettre le pointeur de son dispositif à retour de force, à un endroit privé de retour de force)
- Le contexte : Proposer des informations contextuelles
- La multimodalité : Utiliser toutes les modalités disponibles (plage braille, synthétiseur vocal…)
- L’apprentissage : Proposer un support, voire même des cours pour la phase d’apprentissage de la méthode d’interaction, pour la prise de connaissance de l’environnement et pour le fonctionnement du programme.
4.6 Conclusion
Dans ce chapitre, nous avons présenté le public auquel nous nous intéressons en premier lieu, à savoir les utilisateurs non-voyants.
Nous avons également défini ce que nous attendons d’une démarche d’accessibilité : les concepts mis en œuvre pour une application visant un public spécifique, doivent pouvoir être reprises dans des applications sans public spécifique. L’interaction s’en trouvera, selon les cas, augmentée, améliorée, ou simplifiée.
Pour finir, et afin de positionner notre proposition (voir chapitre suivant), nous avons posé l’état de l’art des réalisations utilisant l’interaction haptique dans une démarche d’accessibilité, ainsi que les recommandations qui ont été émises.
Bibliographie
(1) et (2) concernent les textures virtuelles, (3) à (7) sont sur les objets virtuels, (8) à (9) concernent les objets complexes et leurs orientations et enfin (10) et (11) traitent de l’espace haptique et de sa navigation.↩︎